Author list: Rob BN Scharff, Rens M Doornbusch, Eugeni L Doubrovski, Jun Wu, Jo MP Geraedts, Charlie CL Wang
Published in: IEEE/ASME Transactions on Mechatronics
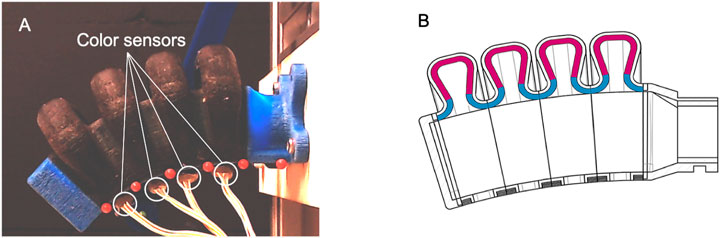
Actuators using soft materials feature a large number of degrees of freedom. This tremendous flexibility allows a soft actuator to passively adapt its shape to the objects under interaction. In this paper, we propose a novel proprioception method for soft actuators during real-time interaction with previously unknown objects. First, we design a color-based sensing structure that instantly translates the inflation of a bellow into changes in color, which are subsequently detected by a miniaturized color sensor. The color sensor is small and, thus, multiple of them can be integrated into soft pneumatic actuators to reflect local deformations. Second, we make use of a feed-forward neural network to reconstruct a multivariate global shape deformation from local color signals. Our results demonstrate that deformations of the actuator during interaction, including sigmoid-like shapes, can be accurately reconstructed. The accurate shape sensing represents a significant step toward closed-loop control of soft robots in unstructured environments.