Author List: Dickson Chiu Yu Wong, Zijian Zhou, Garmisch Lai Yin Wong, Rob BN Scharff
Published in: 2nd Workshop on Dexterous Manipulation: Design, Perception and Control (RSS)
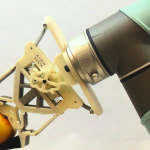
In this article, a 3D-printed soft pneumatic actuator inspired by the structure of a seahorse’s tail is proposed. Unlike previous pre-curved soft pneumatic actuator designs, which primarily focus on straightening action when subjected to positive pressure, our actuator offers a dual-mode actuation capability to mimic the movement of the seahorse tail controlled by muscle contraction. Specifically, it can be straightened under negative pressure and further rolled under positive pressure. Also, its material composition allows it to generate gripping forces. Under atmospheric pressure, the actuator can produce a maximum gripping force of 23N. When subjected to positive pressure, this force increases drastically to 79N. This dual-mode actuation and substantial high force generation capabilities allow for a more appropriate replication of the seahorse tail’s natural movements, making our actuator suitable for diverse tasks such as delicate passive and active grasping, as well as object anchoring.