Author list: Yucheng Luo; Ming Chun Chan; Dickson Chiu Yu Wong; Yuchen Liang; Rob B.N. Scharff
Published in: 2025 IEEE 8th International Conference on Soft Robotics (RoboSoft)
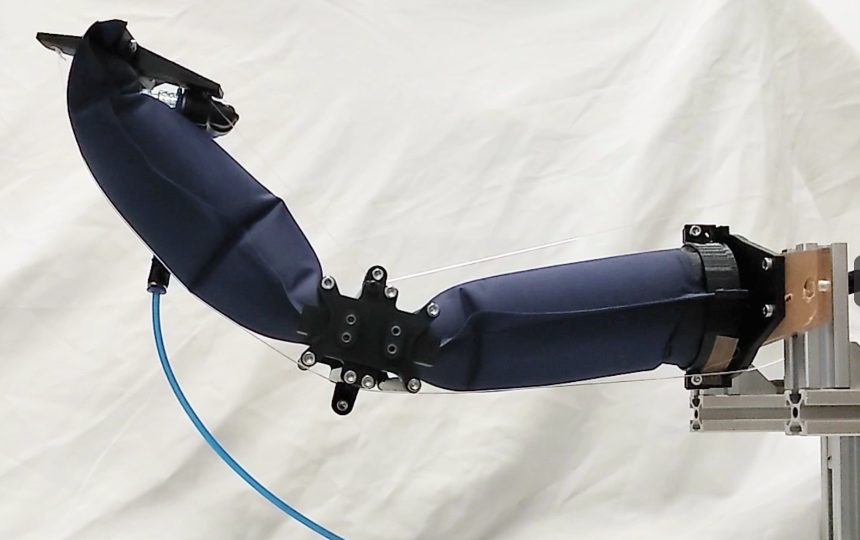
Whole arm manipulation with soft robot arms is a challenging problem because, in contrast to traditional robot arms with grippers mounted at the tip, there can be no fixed division of the arm in a positioning portion for point-to-point movements and a grasping portion for securing the object. The octopus has evolved strategies, such as reaching through bend propagation and fetching through the formation of pseudo-joints, that reduce the biomechanical complexity of its arms while performing point-to-point movements. Inspired by the octopus, this study presents the design, modeling, and characterization of a soft arm with a pneumatically driven lightweight slider. It is demonstrated that the arm can be pneumatically controlled to perform reaching through bend propagation and to move the location of the slider along the arm to form a pseudo-joint. Hereby, this work is a first step towards building a soft robot arm that allows for the implementation of octopus-inspired manipulation strategies.