Author List: Ming Chun CHAN , Jiayun LI , Ziyao WU , Nan WANG , and Rob B.N. SCHARFF
Journal: IEEE ROBOTICS AND AUTOMATION LETTERS, VOL. 10, NO. 11, NOVEMBER 2025
Publication Date: 16 September 2025
Link to Publication: https://doi.org/10.1109/LRA.2025.3610293
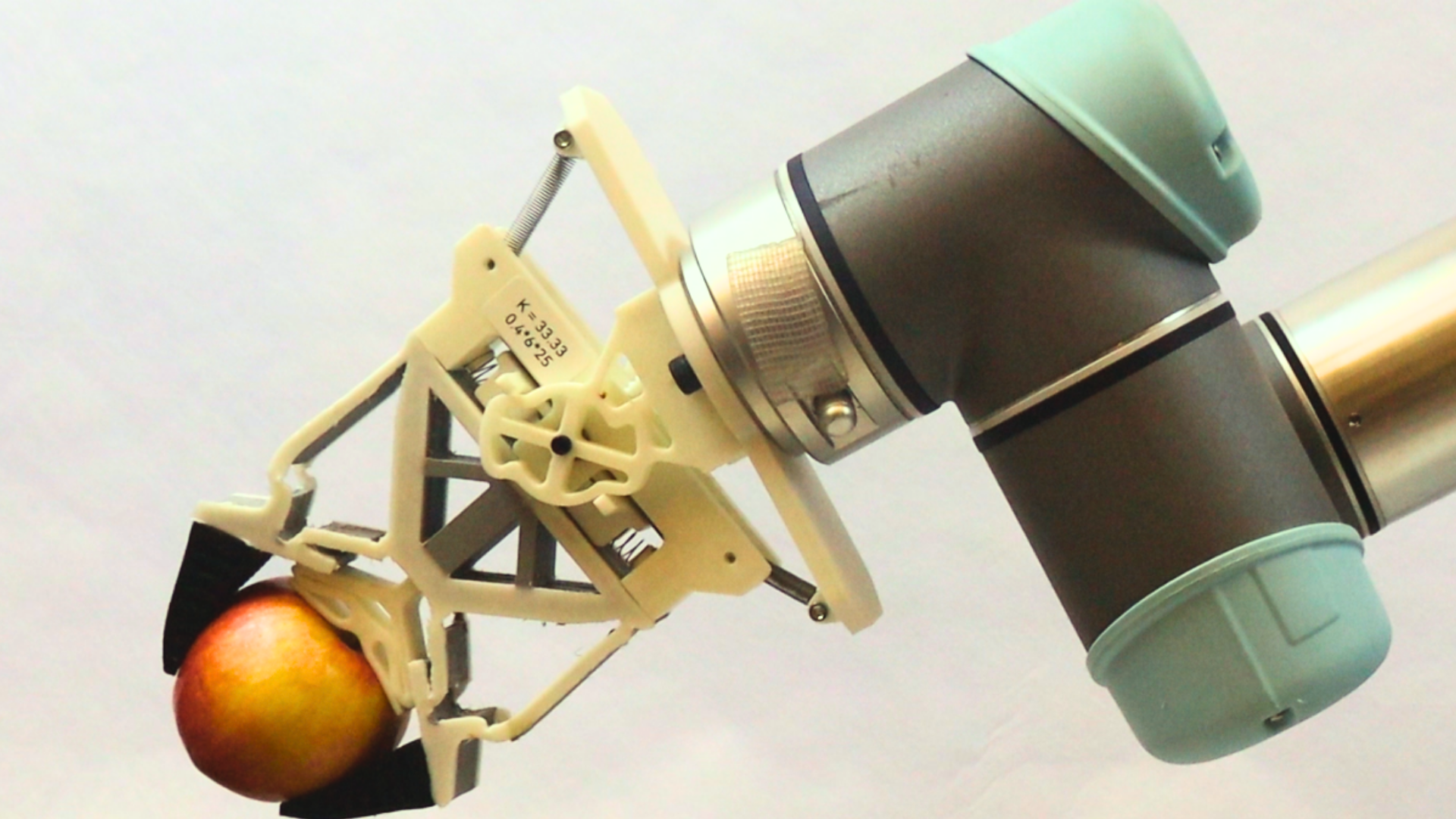
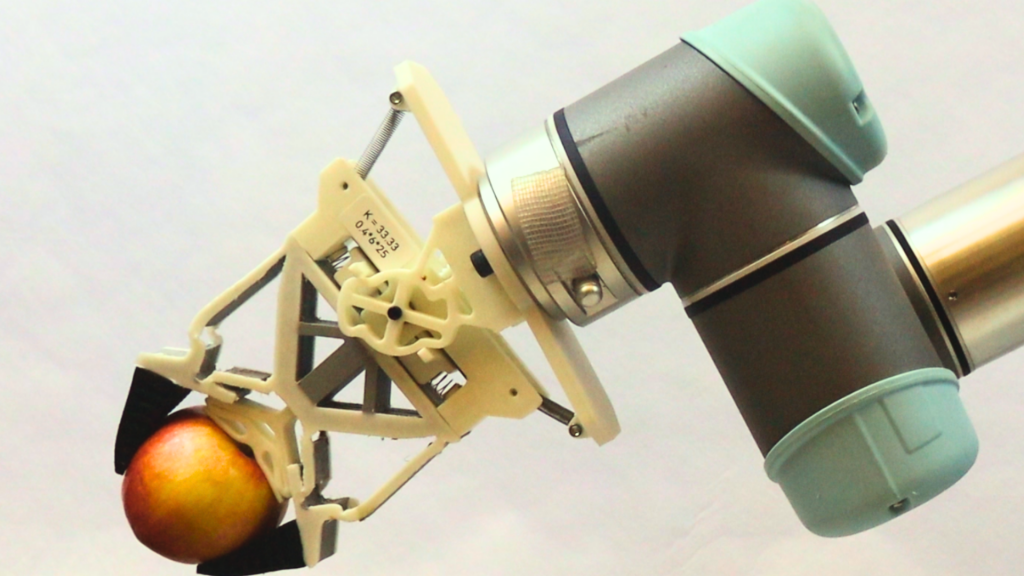
Abstract: This letter presents a mechanically intelligent gripper that is capable of passive and adaptive object prehension, passive object retention, and passive object release. Passive adaptive prehension is achieved through a compliant linkage with two Fin Ray fingers that enclose an object when the gripper is pushed onto it. The object is held firmly in place during transport by a linear ratchet mechanism that locks the compliant mechanism in place. An asymmetric ratchet release mechanism releases the object using gravitational force when the gripper is maneuvered in its releaseorientation. The absence of actuators, electronics, and a tether or embedded power source make the presented adaptive gripper a promising technology for challenging environments where low energy consumption and robustness to dirt and water are critical.
Index Terms—Compliant joints and mechanisms, embodied intelligence, underactuated robots.