Journal: Frontiers in Robotics and AI Soft Robotics, Moonshot Goals of Soft Robotics through Embodied Intelligence
Publication Date: 7th May 2026
Link to Publication: https://www.frontiersin.org/journals/robotics-and-ai/articles/10.3389/frobt.2026.1747157/full
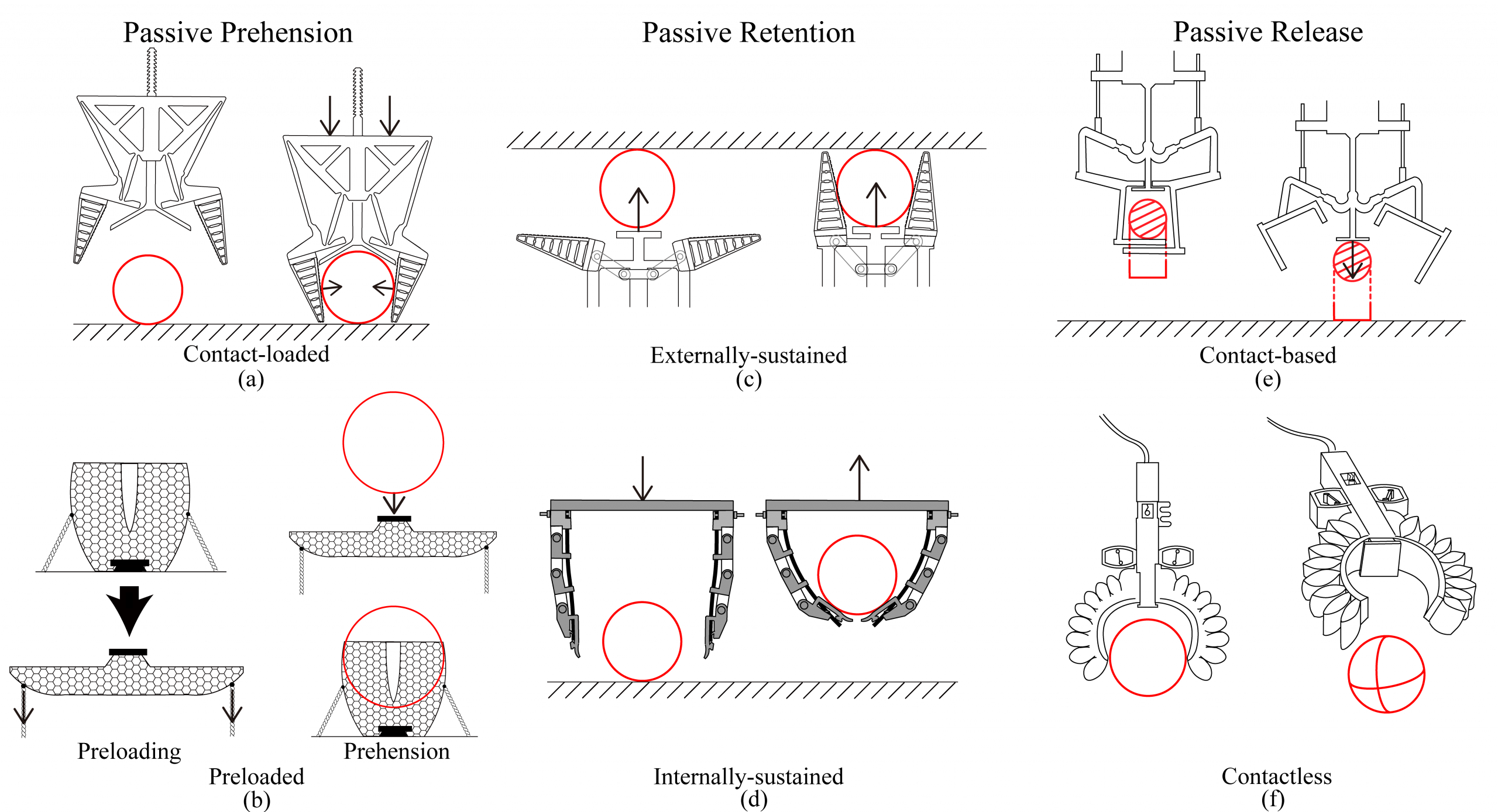
Abstract: Passive adaptive grippers leverage existing degrees of freedom (DOFs) of an external host system such as a robotic arm to complete a manipulation task. These grippers commonly rely on embodied intelligence to achieve this goal, leveraging interaction between the gripper and the environment to trigger prehension, retention, and release of an object. This mini-review establishes a framework for classification of state-of-the-art passive gripper designs across three phases of the gripping procedure: passive prehension (contact-loaded or preloaded), passive retention (externally or internally-sustained), and passive release (contact-based or contactless). Hereby, this work aims to accelerate future research on passive adaptive grippers and provide guidance for application-specific gripper design. Fully passive grippers that simultaneously combine reliable prehension, internally-sustained retention, and contactless release remain scarce. A fundamental trade-off exists between the gripper’s controllability and the host system’s flexibility; optimal gripper design must therefore be tailored to the specific task and operational constraints. Another key challenge is to minimize the force required to be exerted on the object to activate passive prehension. A promising direction towards addressing this challenge is the development of passive preloading mechanisms.