
Recent Publications
-
Octopus-Inspired Embodied Tactile Intelligence: A Universally-Calibrated Miniature Vision-Based Suction Cup
Yuchen Liang, Lai Yin Garmisch Wong, Yang Wei, Ming Chun Chan, Wenqi Hu and Rob B.N. Scharff
IEEE/ASME Transactions on Mechatronics TMECH/AIM Emerging Topics Focused Section
-
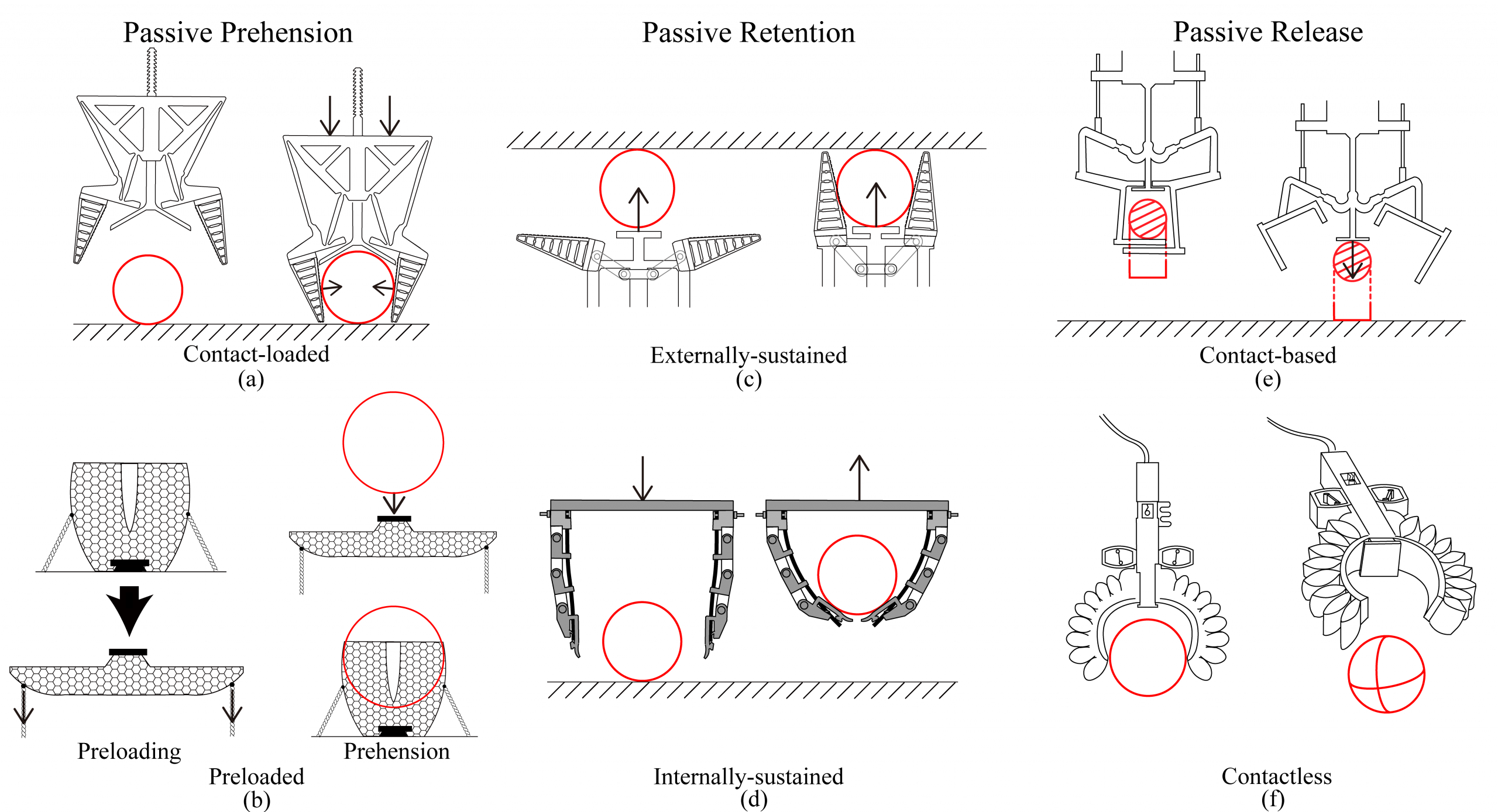
Passive Adaptive Grippers: a mini-review
Ming Chun Chan, Rob B. N. Scharff
Frontiers in Robotics and AI Soft Robotics, Moonshot Goals of Soft Robotics through Embodied Intelligence
-
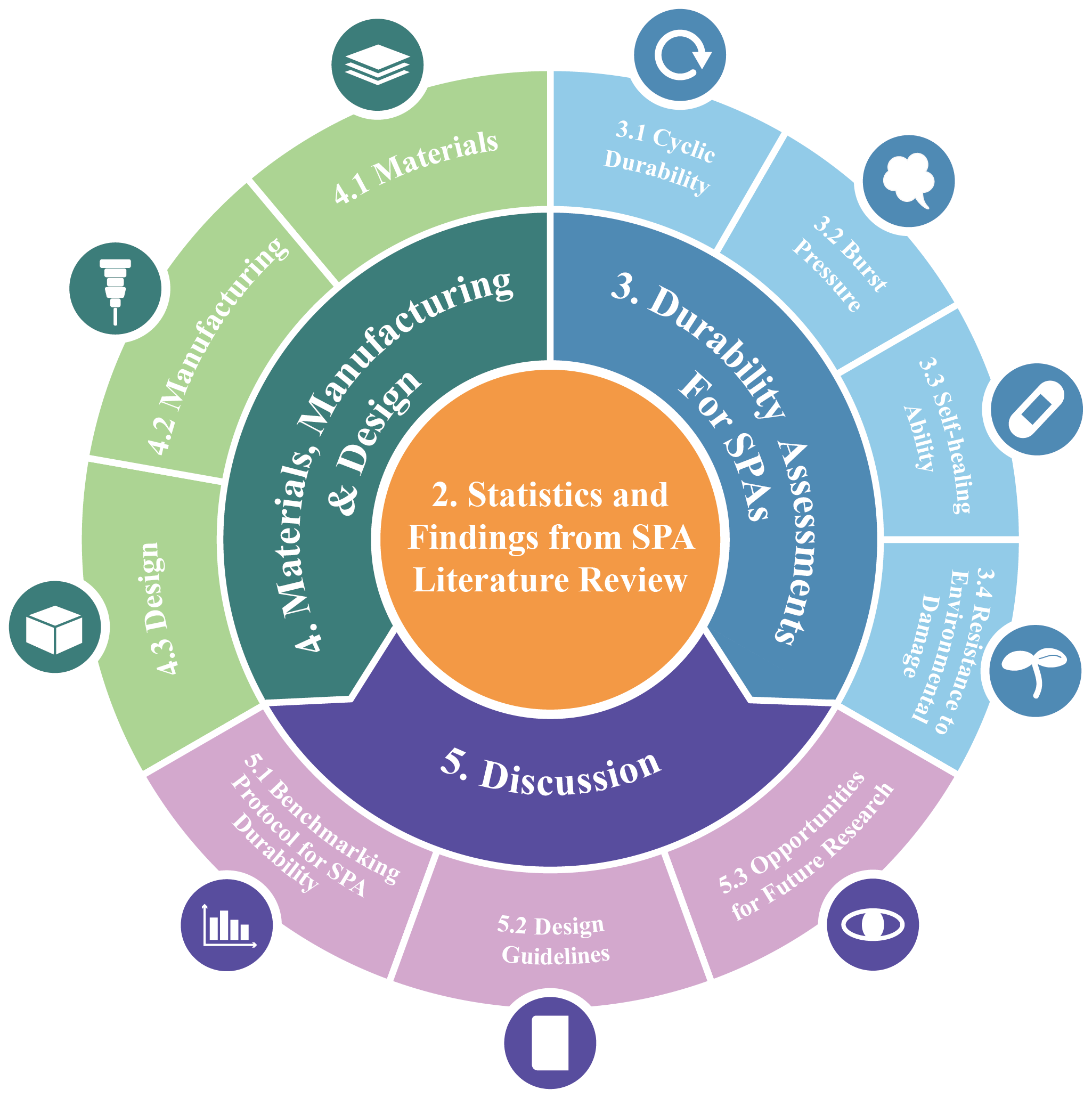
Durability of Soft Pneumatic Actuators: A Review and Benchmarking Protocol
Dickson Chiu Yu Wong, Yucheng Luo, Rob Bernardus Nicolaas Scharff
Advanced Robotics Research
-
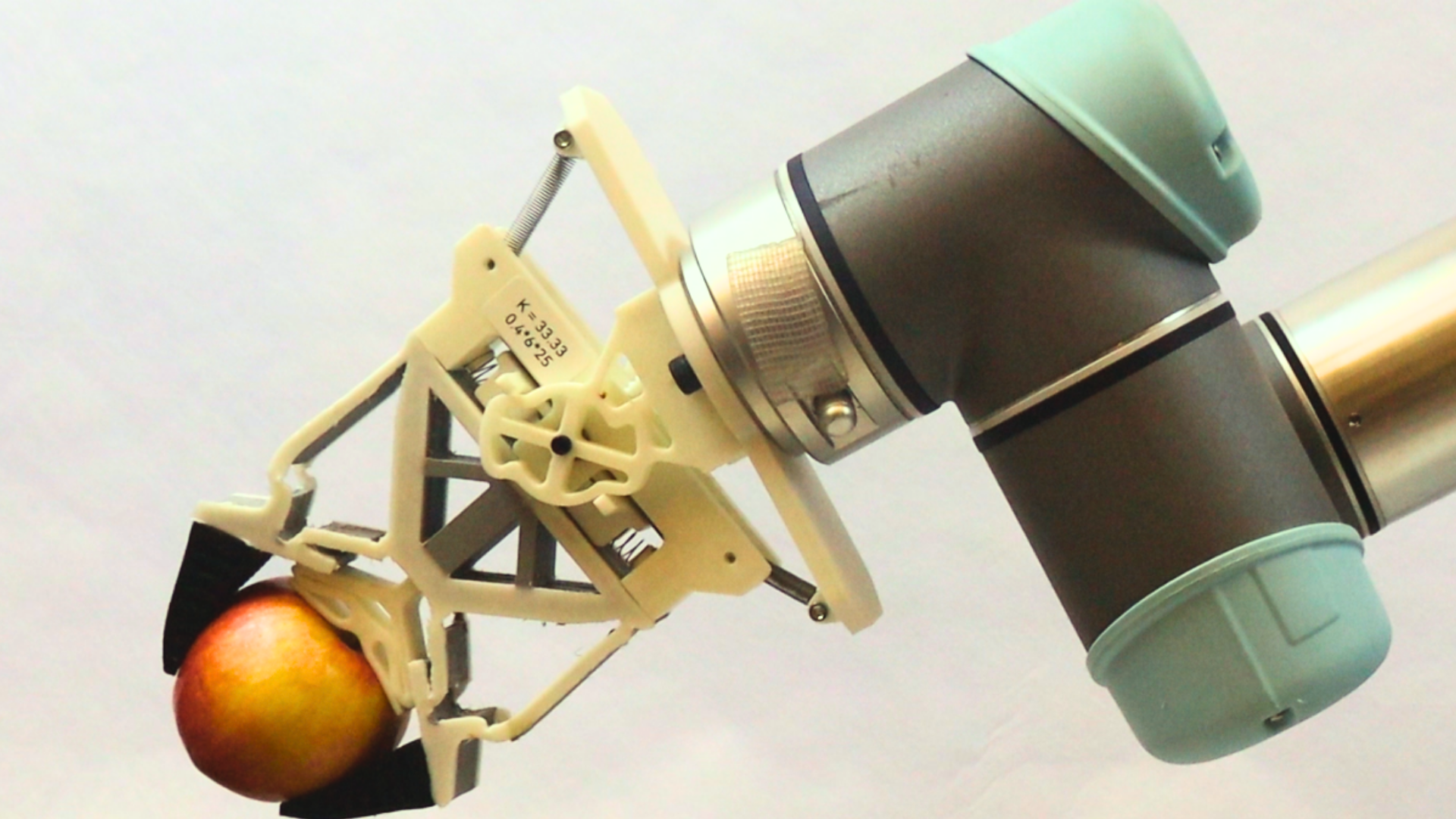
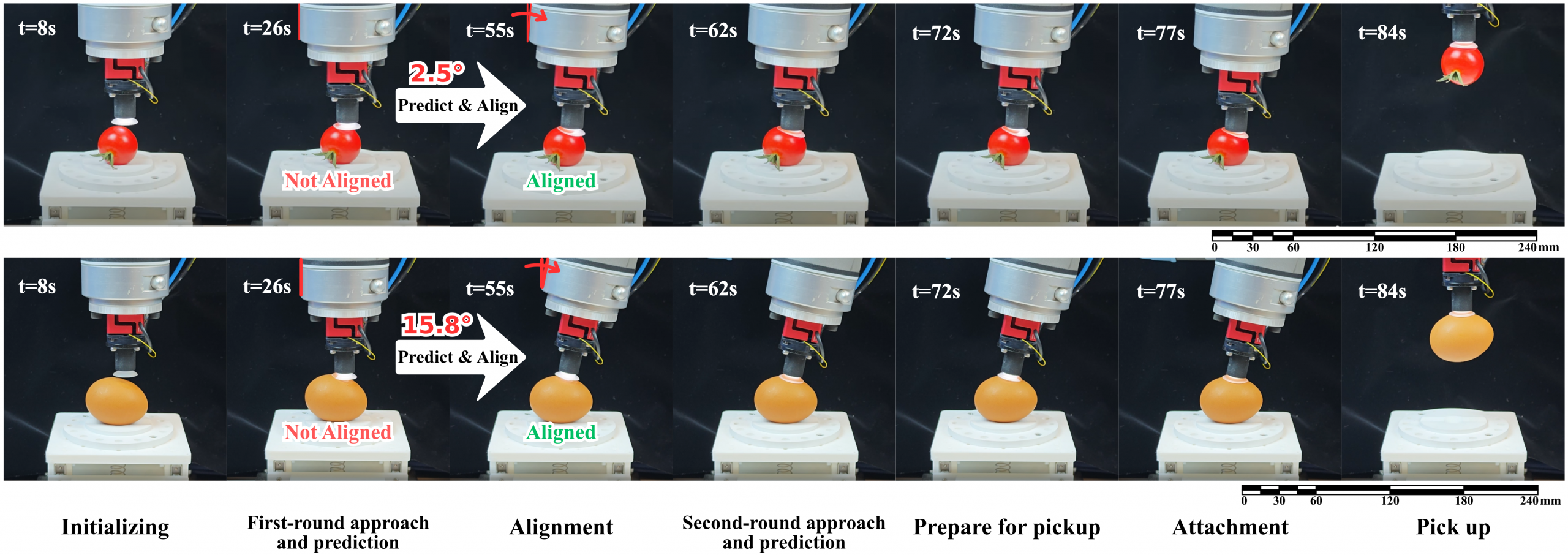
Passive Adaptive Object Prehension, Retention, and Release With a Mechanically Intelligent Gripper
Ming Chun CHAN , Jiayun LI , Ziyao WU , Nan WANG , and Rob B.N. SCHARFF
IEEE Robotics and Automation Letters (RAL)
-
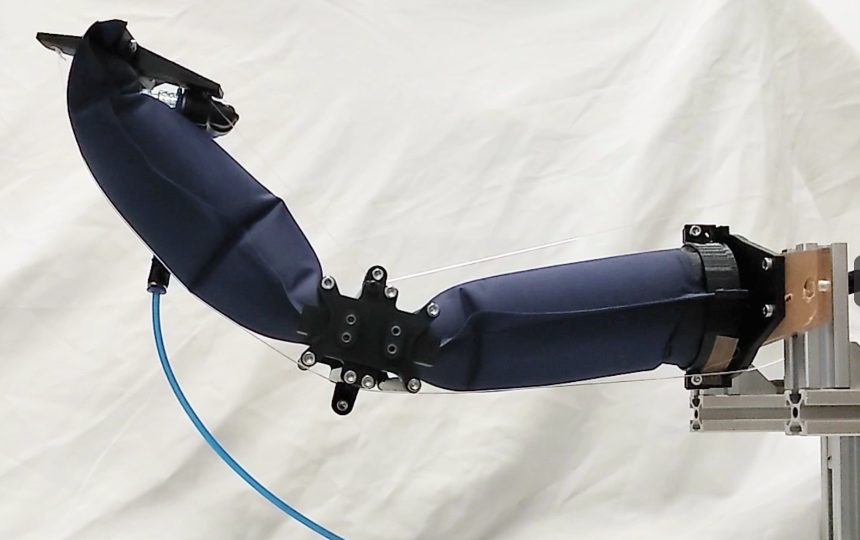
Toward Octopus-inspired Whole arm Manipulation: A Sliding Pseudo-joint for Soft Pneumatic Robot Arm
Yucheng Luo; Ming Chun Chan; Dickson Chiu Yu Wong; Yuchen Liang; Rob B.N. Scharff
2025 IEEE 8th International Conference on Soft Robotics (RoboSoft)
-
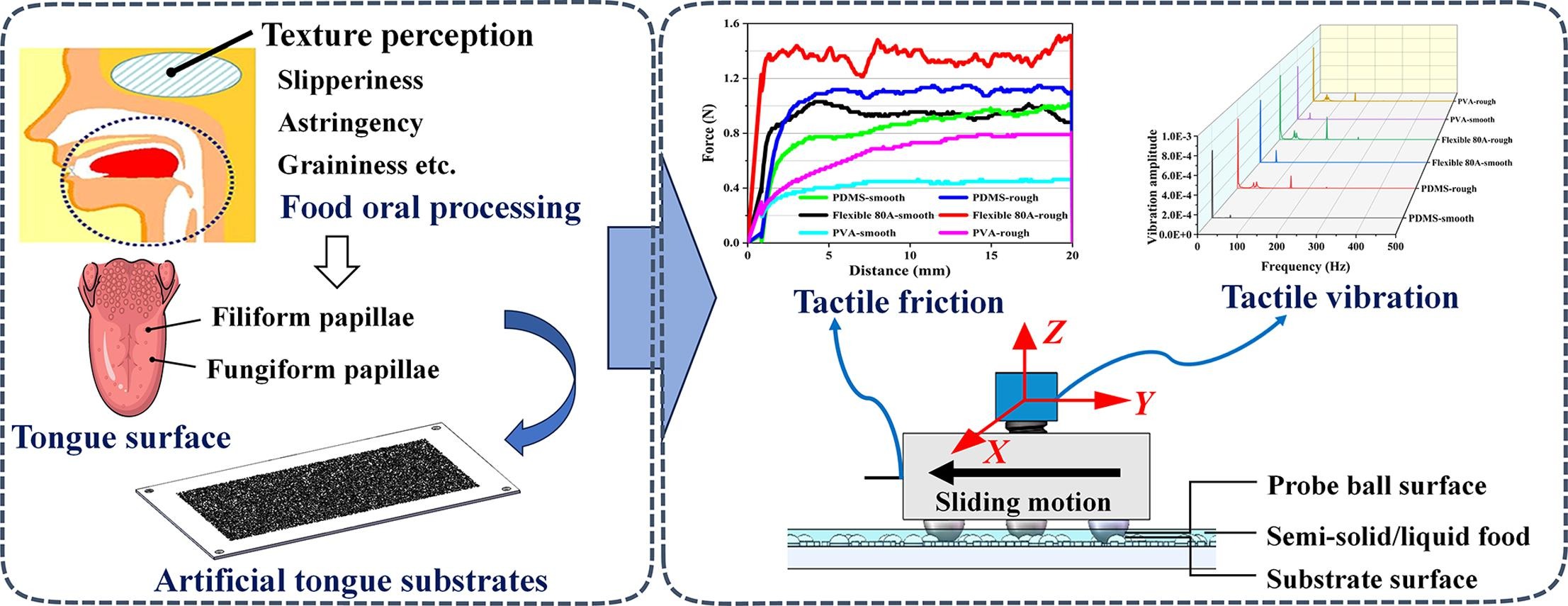
Application of biomimetic tongue substrate to investigate the role of friction and vibration in sensory texture perception
Liwen Huang, Chengjin Du, Rob BN Scharff, Lucia Beccai, Jun Wang, Dongdong Du
Food Research International
-
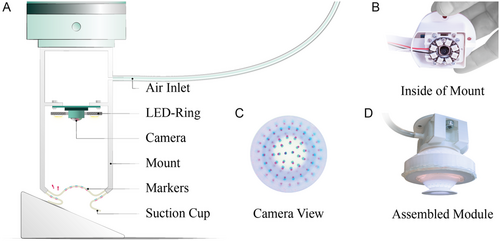
Optoelectronically Innervated Suction Cup Inspired by the Octopus
Stein van Veggel, Michaël Wiertlewski, Eugeni L. Doubrovski, Adrie Kooijman, Barbara Mazzolai, and Rob B.N. Scharff
Advanced Intelligent Systems
-
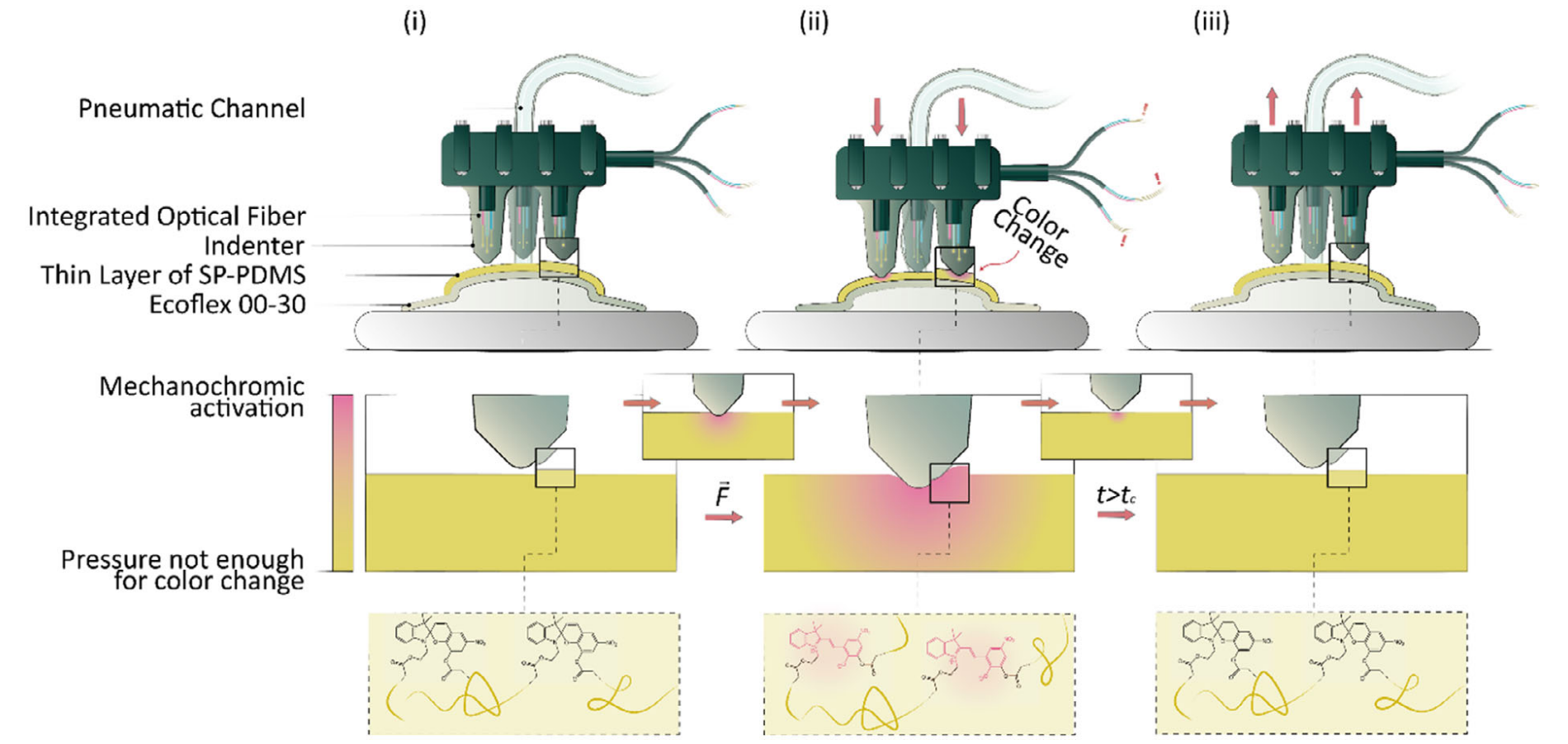
Mechanochromic suction cups for local stress detection in soft robotics
Goffredo Giordano, Rob Bernardus Nicolaas Scharff, Marco Carlotti, Mariacristina Gagliardi, Carlo Filippeschi, Alessio Mondini, Antonio Papangelo, Barbara Mazzolai
Advanced Intelligent Systems
-
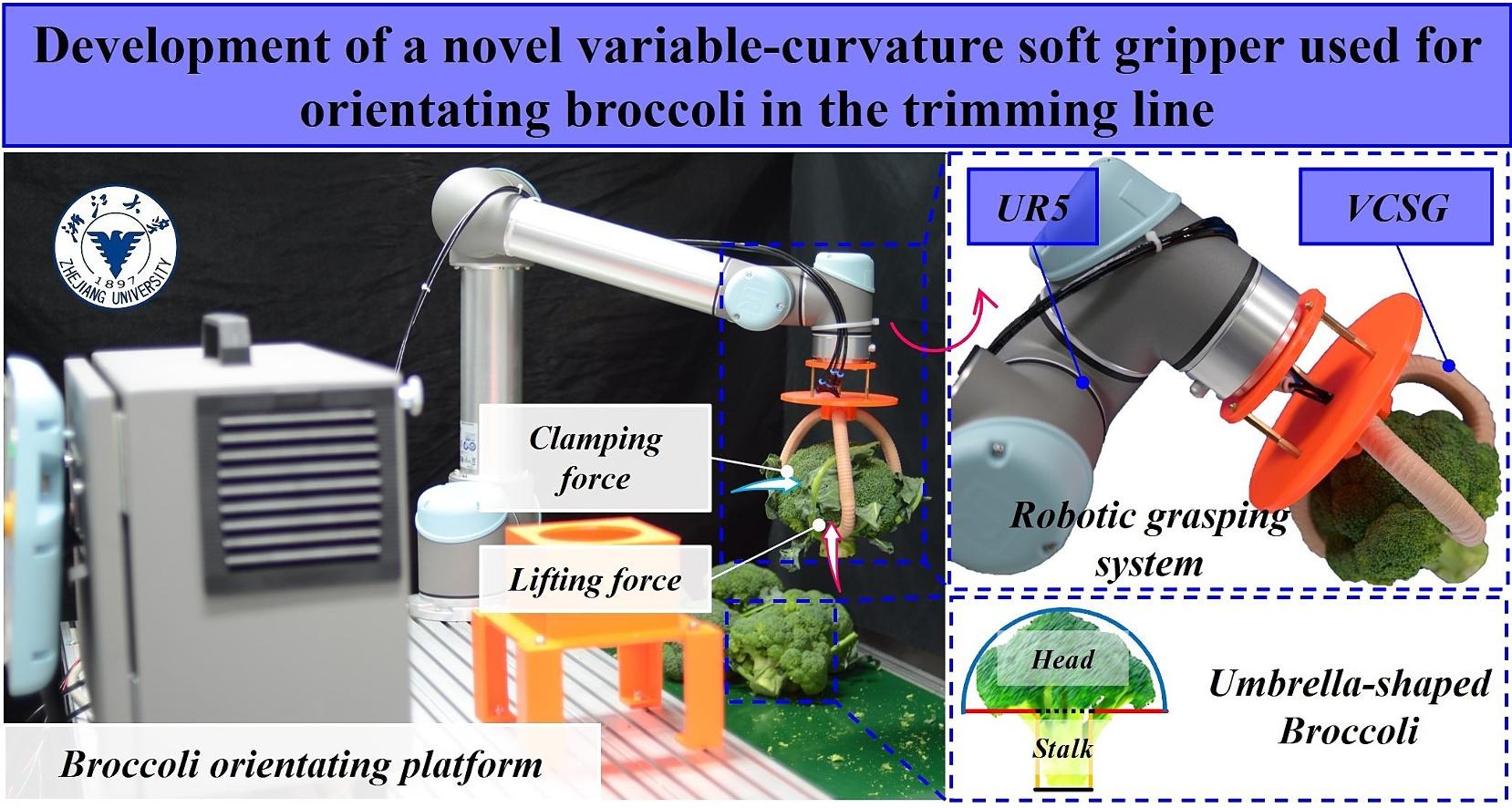
Development of a novel variable-curvature soft gripper used for orientating broccoli in the trimming line
Yongkai Ye, Chaoyue Han, Shuo Kang, Jianzhuang Zhao, Rob BN Scharff, Jun Wang, Dongdong Du
Computers and Electronics in Agriculture
-
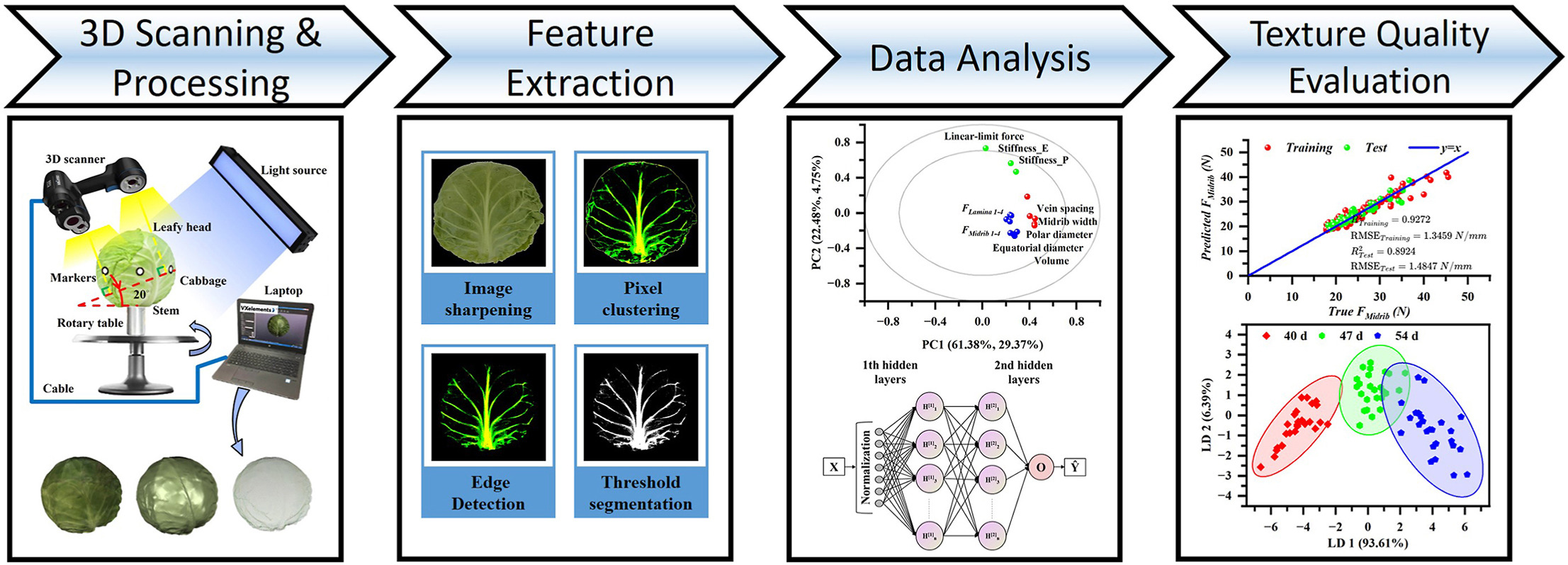
Nondestructive evaluation of harvested cabbage texture quality using 3D scanning technology
Dongdong Du, Yongkai Ye, Dongfang Li, Jie Fan, Rob BN Scharff, Jun Wang, Fake Shan
Journal of Food Engineering