
Yuchen LIANG
-
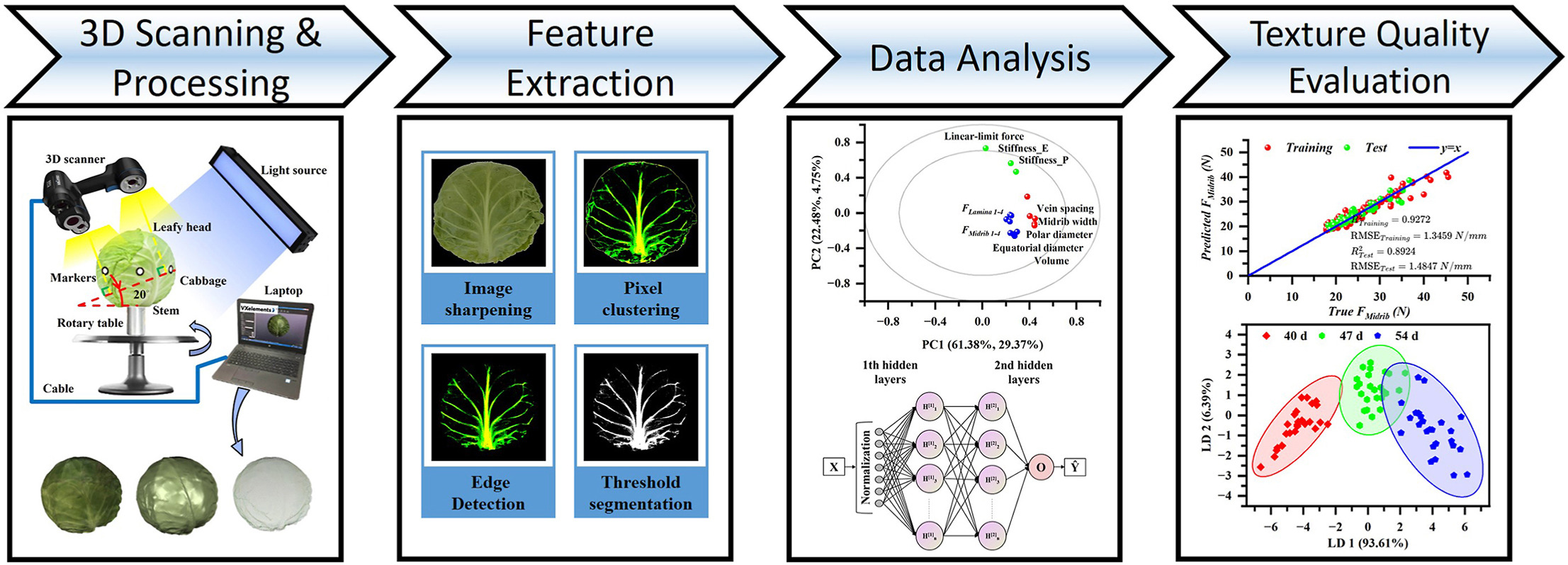
Nondestructive evaluation of harvested cabbage texture quality using 3D scanning technology
Author List: Dongdong Du, Yongkai Ye, Dongfang Li, Jie Fan, Rob BN Scharff, Jun Wang, Fake Shan Published in: Journal of Food Engineering Current nondestructive methods for evaluating the texture quality of leafy vegetables have limitations due to their complicated leafy structure. In this study, a promising solution was proposed using 3D scanning technology…
-
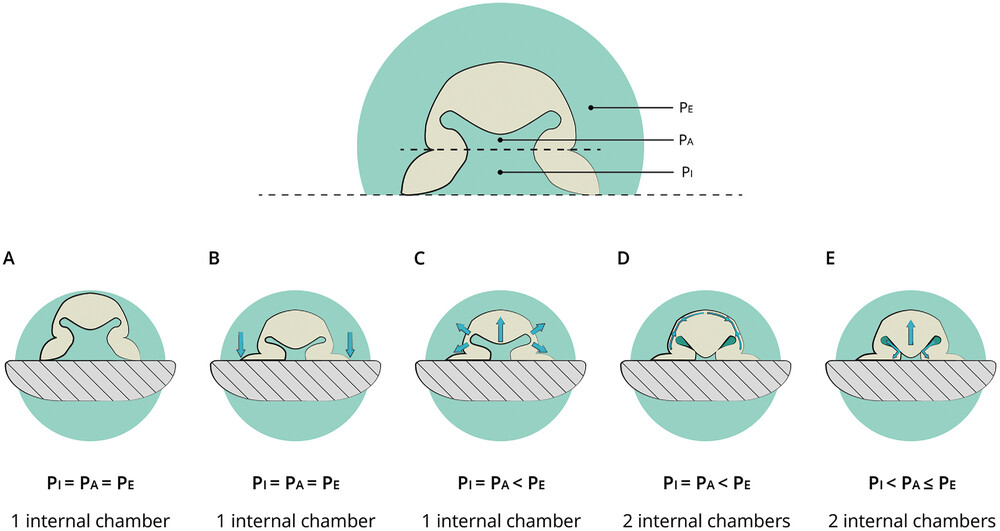
Classification and evaluation of octopus‐inspired suction cups for soft continuum robots
Author List: Stein van Veggel, Michaël Wiertlewski, Eugeni L Doubrovski, Adrie Kooijman, Ebrahim Shahabi, Barbara Mazzolai, Rob BN Scharff Published in: Advanced Science The emergence of the field of soft robotics has led to an interest in suction cups as auxiliary structures on soft continuum arms to support the execution…
-

Seahorse Tail-inspired Soft Pneumatic Actuator Utilizing Dual-mode Actuation
Author List: Dickson Chiu Yu Wong, Zijian Zhou, Garmisch Lai Yin Wong, Rob BN Scharff Published in: 2nd Workshop on Dexterous Manipulation: Design, Perception and Control (RSS) In this article, a 3D-printed soft pneumatic actuator inspired by the structure of a seahorse’s tail is proposed. Unlike previous pre-curved soft pneumatic…
-

Autonomy Award RoboSoft 2024
Our lab’s team (Team RobUST) attended RoboSoft 2024 Fruit Salad Competition and won the Autonomy Award
-
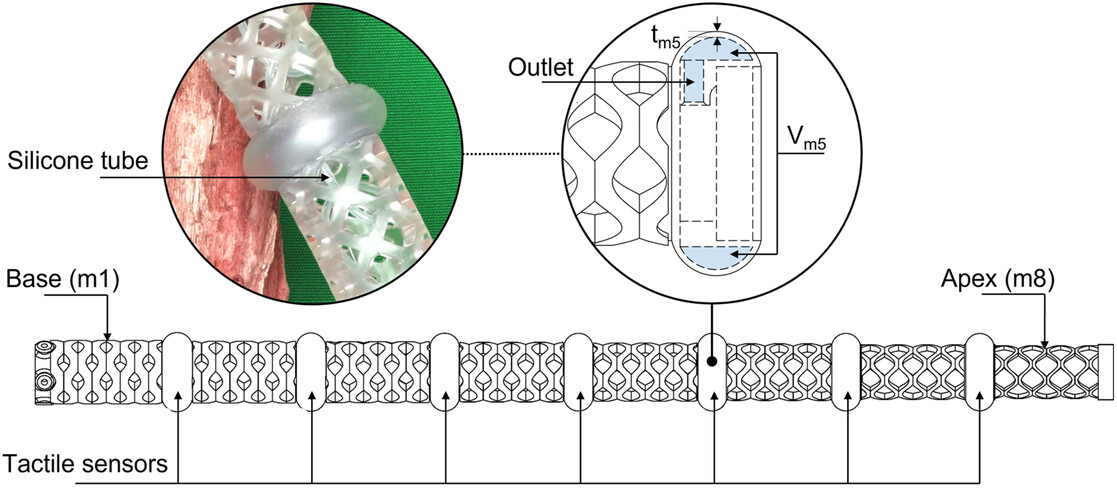
A Soft Continuum Robotic Arm with a Climbing Plant‐Inspired Adaptive Behavior for Minimal Sensing, Actuation, and Control Effort
Author List: Giovanna A Naselli, Rob BN Scharff, Marc Thielen, Francesco Visentin, Thomas Speck, Barbara Mazzolai Published in: Advanced Intelligent Systems A key challenge in designing soft continuum robotic arms is the realization of intelligent behavior while minimizing sensing, actuation, and control effort. This work investigates how soft continuum arms…
-
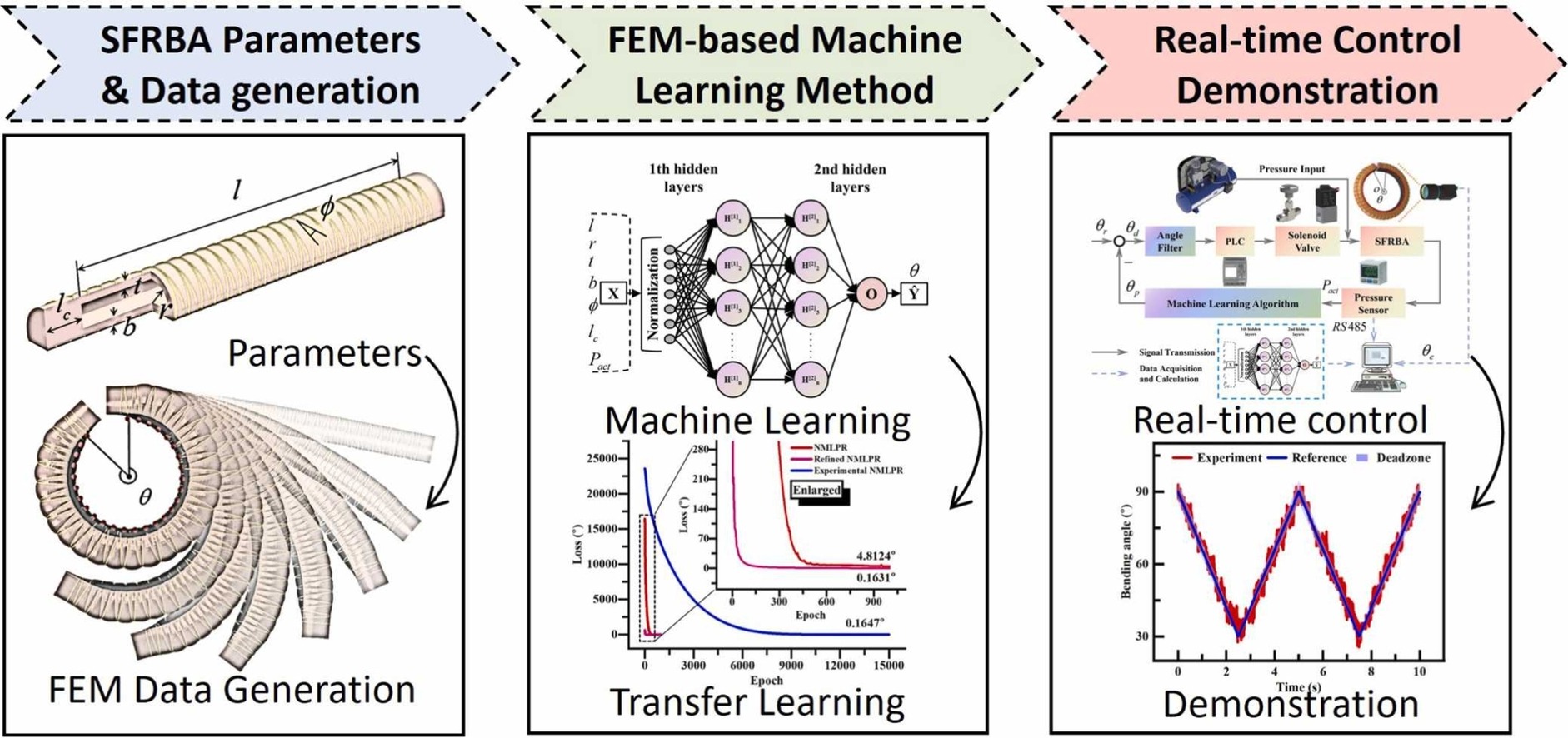
Modelling of soft fiber-reinforced bending actuators through transfer learning from a machine learning algorithm trained from FEM data
Author List: Yongkai Ye, Rob BN Scharff, Sifang Long, Chaoyue Han, Dongdong Du Published in: Sensors and Actuators A: Physical A soft fiber-reinforced bending actuator (SFRBA) is a multi-material system that plays a crucial role in robotics applications due to its high output force and robust bending motion. However, the multi-material composition of SFRBAs…
-
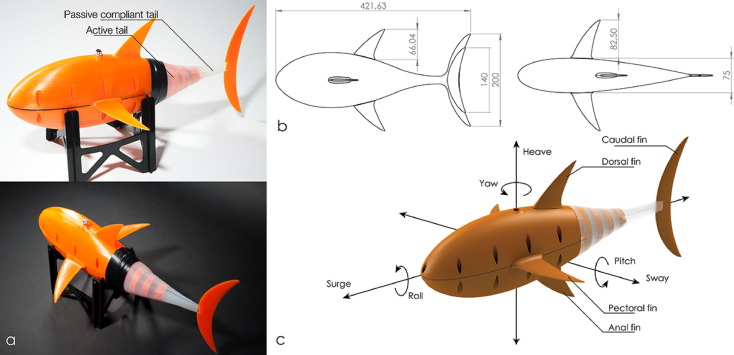
OpenFish: Biomimetic design of a soft robotic fish for high speed locomotion
Author List: SC Van Den Berg, RBN Scharff, Z Rusák, J Wu Published in: HardwareX 12, e00320 We present OpenFish: an open source soft robotic fish which is optimized for speed and efficiency. The soft robotic fish uses a combination of an active and passive tail segment to accurately mimic…
-
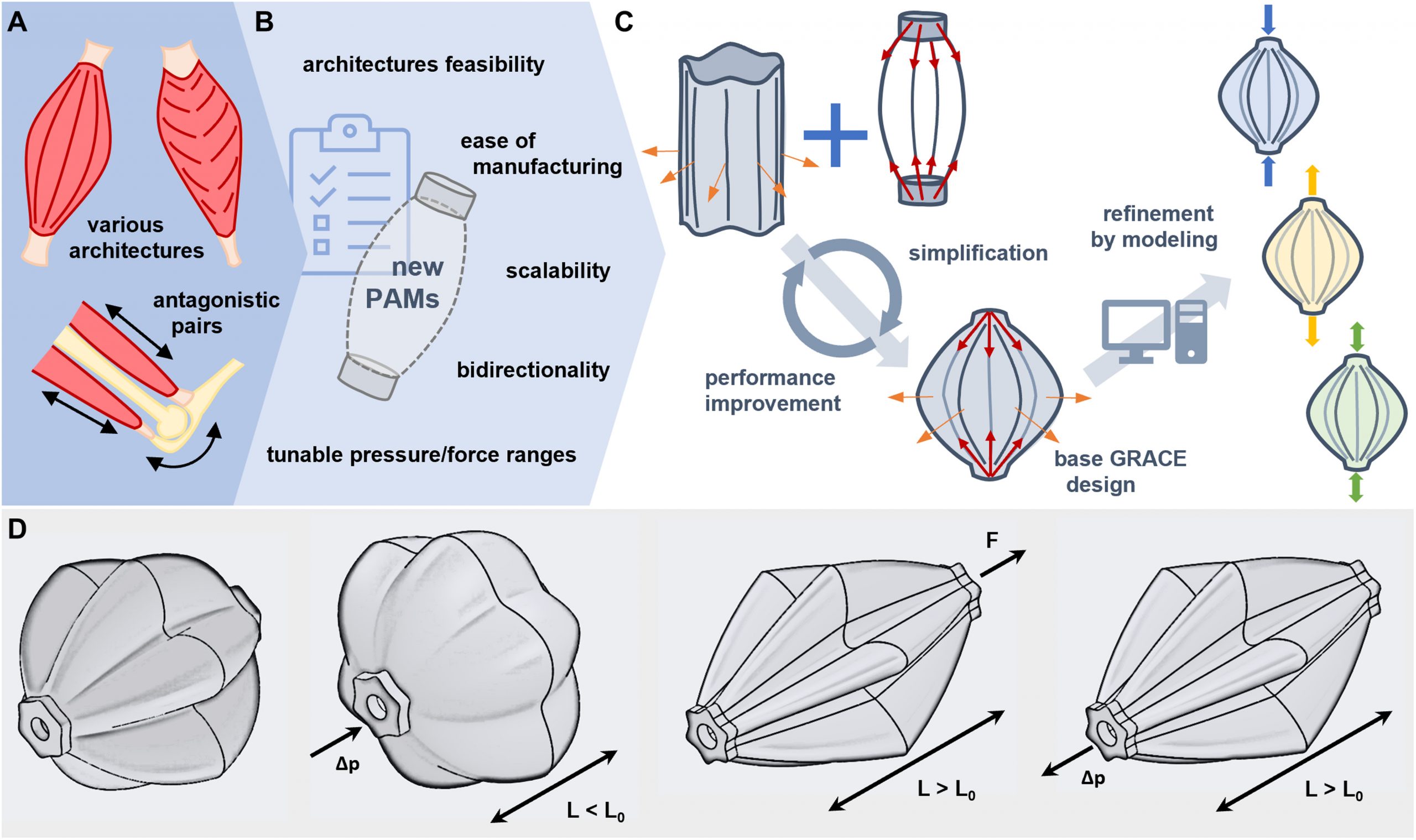
3D-printed biomimetic artificial muscles using soft actuators that contract and elongate
Author List: C De Pascali, GA Naselli, S Palagi, RBN Scharff, B Mazzolai Published in: Science Robotics 7 (68), eabn4155 Biomimetic machines able to integrate with natural and social environments will find ubiquitous applications, from biodiversity conservation to elderly daily care. Although artificial actuators have reached the contraction performances of…
-
Rapid manufacturing of color-based emispherical soft tactile fingertips
Author List: RBN Scharff, DJ Boonstra, L Willemet, X Lin, M Wiertlewski Published in: 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft) Tactile sensing can provide access to information about the contact (i.e. slippage, surface feature, friction), which is out of reach of vision but crucial for manipulation. To…
-
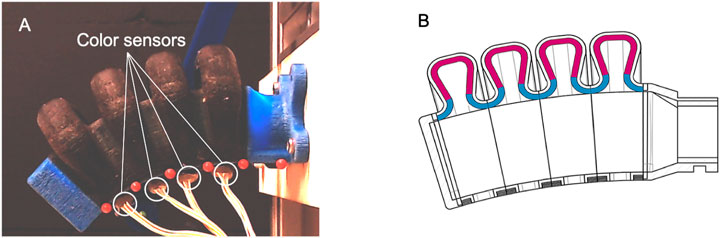
Color-based proprioception of soft actuators interacting with objects
Author list: Rob BN Scharff, Rens M Doornbusch, Eugeni L Doubrovski, Jun Wu, Jo MP Geraedts, Charlie CL Wang Published in: IEEE/ASME Transactions on Mechatronics Actuators using soft materials feature a large number of degrees of freedom. This tremendous flexibility allows a soft actuator to passively adapt its shape to…