
Yuchen LIANG
-
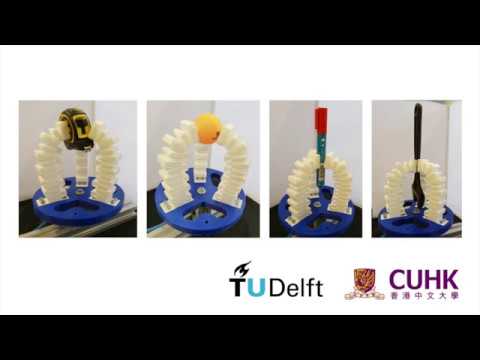
Reducing out-of-plane deformation of soft robotic actuators for stable grasping
Author list: Rob BN Scharff, Jun Wu, Jo MP Geraedts, Charlie CL Wang Published in: 2019 2nd IEEE international conference on soft robotics (RoboSoft) For grasping (unknown) objects, soft pneumatic actuators are primarily designed to bend towards a specific direction. Due to the flexibility of material and structure, soft actuators…