

Publications
-
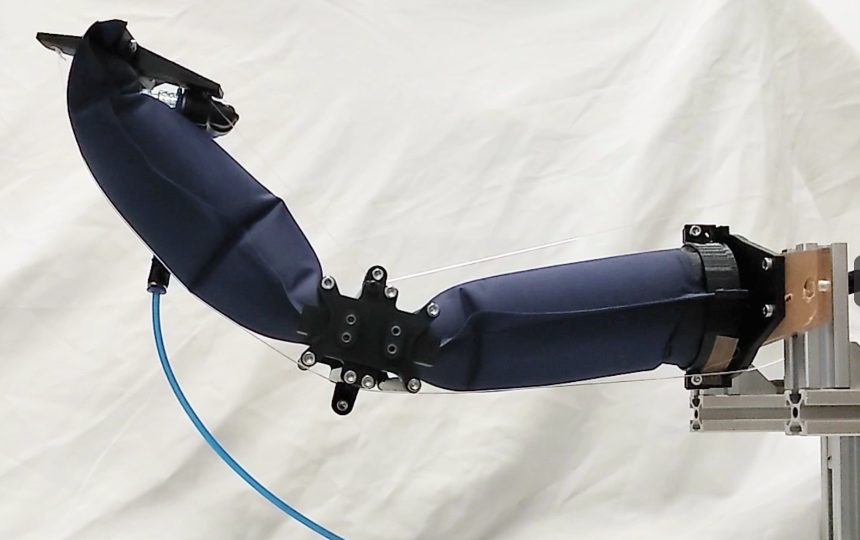
Toward Octopus-inspired Whole arm Manipulation: A Sliding Pseudo-joint for Soft Pneumatic Robot Arm
Author list: Yucheng Luo; Ming Chun Chan; Dickson Chiu Yu Wong; Yuchen Liang; Rob B.N. Scharff Published in: 2025 IEEE 8th International Conference on Soft Robotics (RoboSoft) Whole arm manipulation with soft robot arms is a challenging problem because, in contrast to traditional robot arms with grippers mounted at the…
-
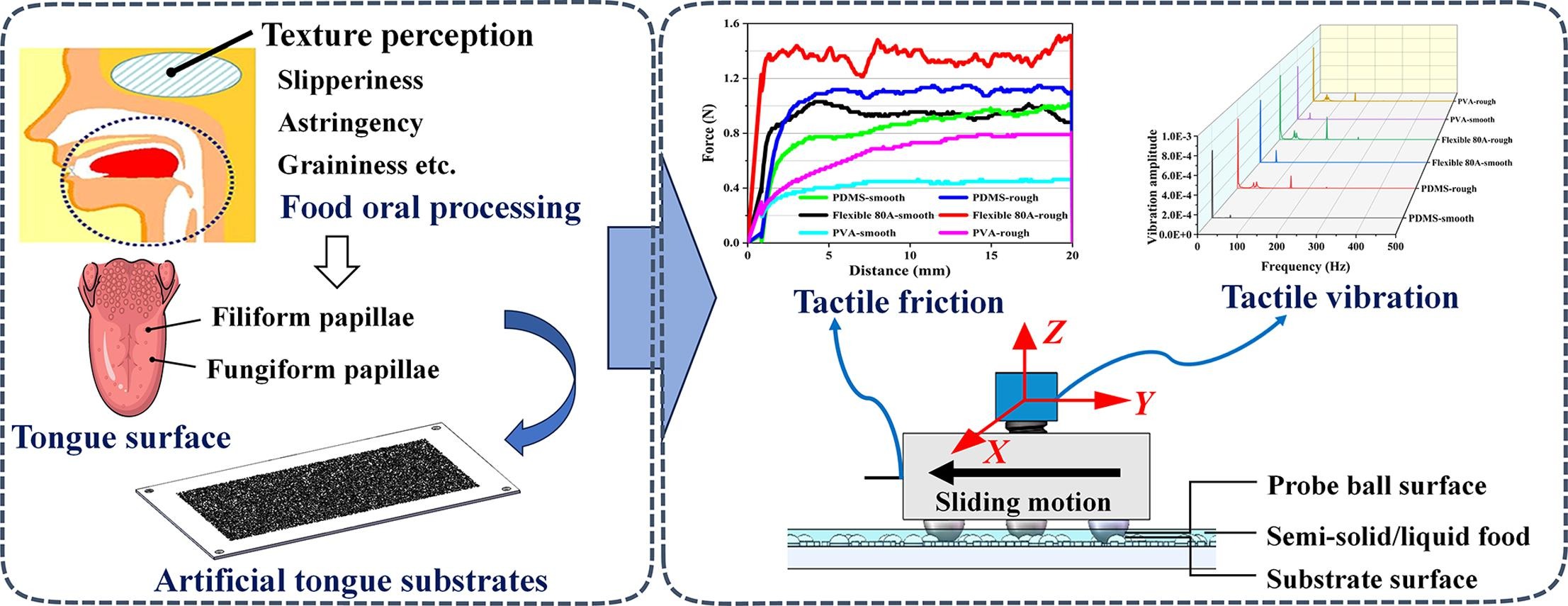
Application of biomimetic tongue substrate to investigate the role of friction and vibration in sensory texture perception
Author List: Liwen Huang, Chengjin Du, Rob BN Scharff, Lucia Beccai, Jun Wang, Dongdong Du Published in: Food Research International The suckers on the octopus arm play a pivotal role in the execution of tasks in unstructured environments by providing a means to grip objects as well as perceive the…
-
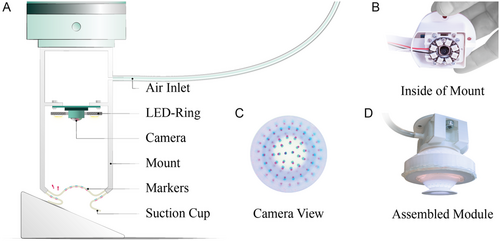
Optoelectronically Innervated Suction Cup Inspired by the Octopus
Author List: Stein van Veggel, Michaël Wiertlewski, Eugeni L. Doubrovski, Adrie Kooijman, Barbara Mazzolai, and Rob B.N. Scharff Published in: Advanced Intelligent Systems The suckers on the octopus arm play a pivotal role in the execution of tasks in unstructured environments by providing a means to grip objects as well…
-
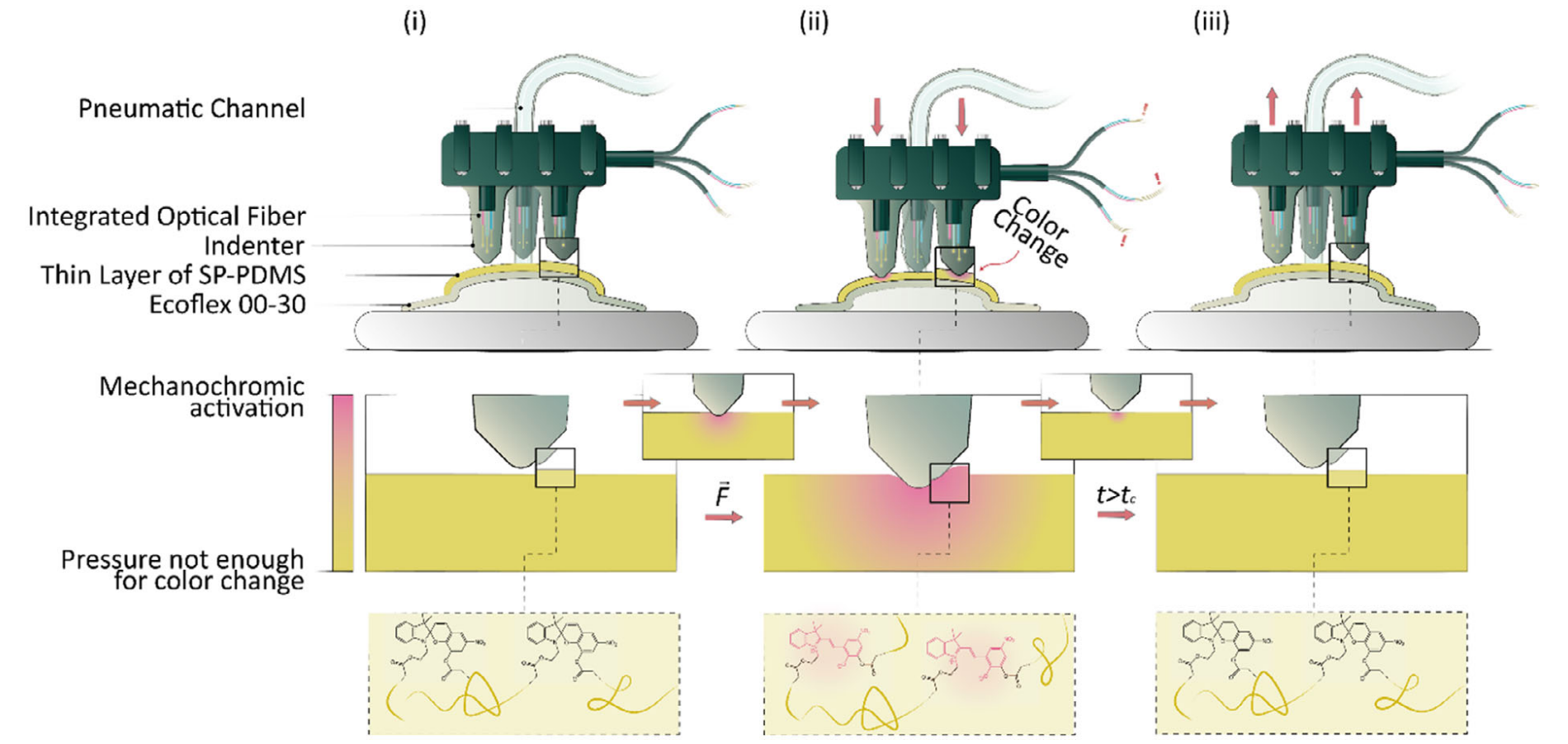
Mechanochromic suction cups for local stress detection in soft robotics
Author List: Goffredo Giordano, Rob Bernardus Nicolaas Scharff, Marco Carlotti, Mariacristina Gagliardi, Carlo Filippeschi, Alessio Mondini, Antonio Papangelo, Barbara Mazzolai Published in: Advanced Intelligent Systems Advancements in smart soft materials are enhancing the capabilities of roboticmanipulators in object interactions and complex tasks. Mechanochromic materials, acting as lightweight sensors, offer easily…
-
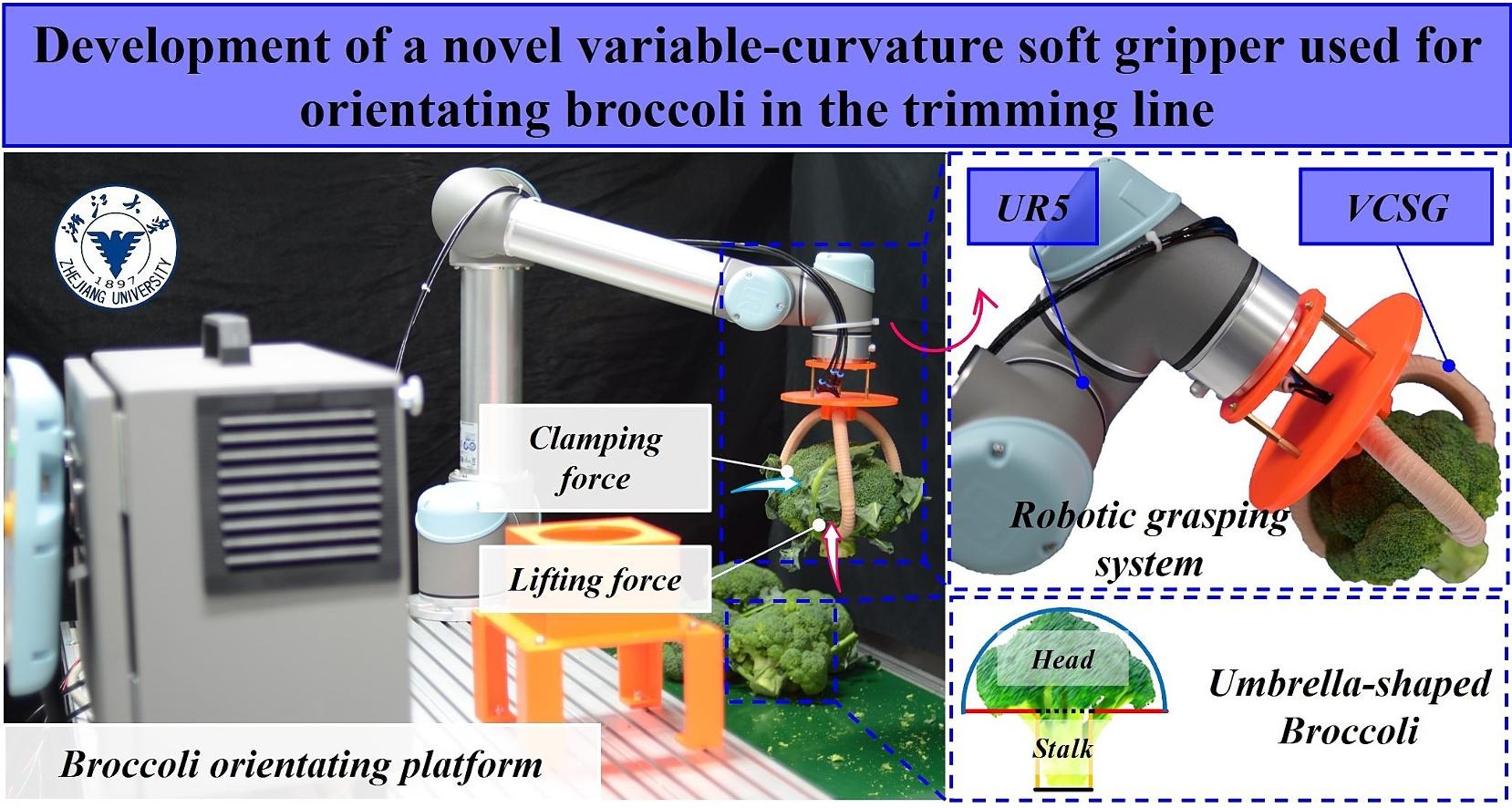
Development of a novel variable-curvature soft gripper used for orientating broccoli in the trimming line
Author List: Yongkai Ye, Chaoyue Han, Shuo Kang, Jianzhuang Zhao, Rob BN Scharff, Jun Wang, Dongdong Du Published in: Computers and Electronics in Agriculture Orientating the broccoli plays an important part in the trimming line, which helps reduce the redundant stalk length and provides accurate throughput data for sale. However,…
-
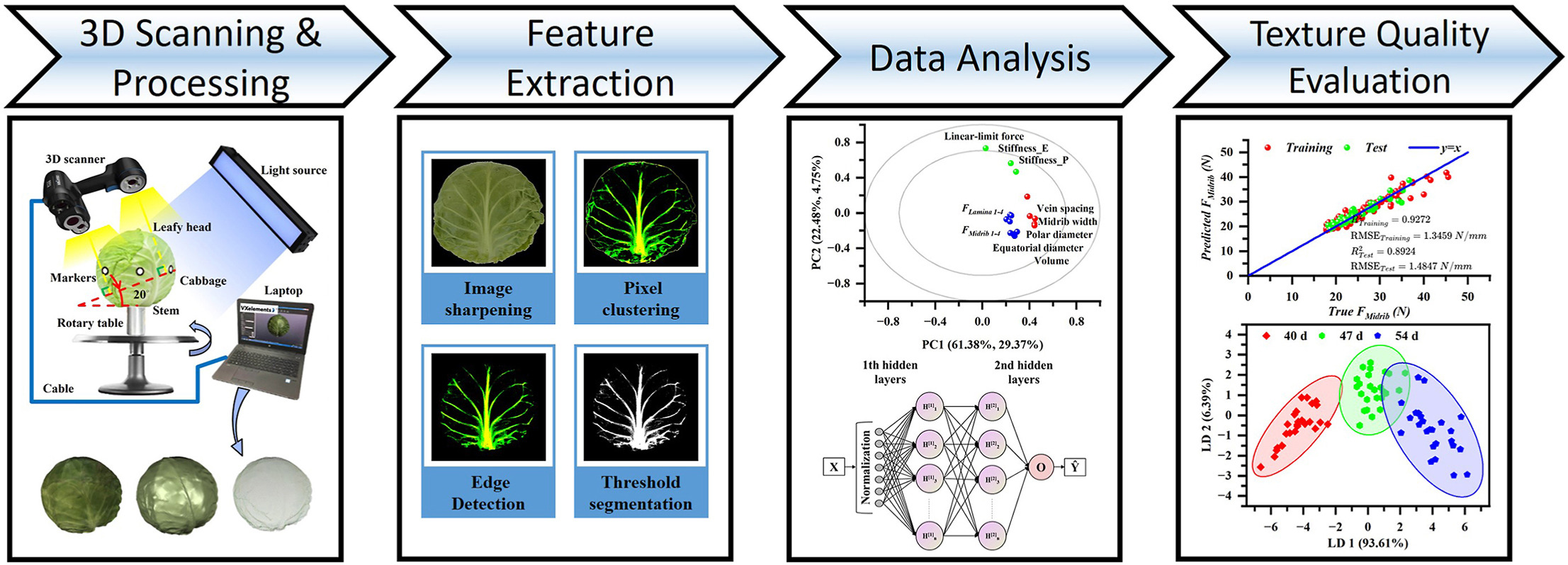
Nondestructive evaluation of harvested cabbage texture quality using 3D scanning technology
Author List: Dongdong Du, Yongkai Ye, Dongfang Li, Jie Fan, Rob BN Scharff, Jun Wang, Fake Shan Published in: Journal of Food Engineering Current nondestructive methods for evaluating the texture quality of leafy vegetables have limitations due to their complicated leafy structure. In this study, a promising solution was proposed using 3D scanning technology…
-
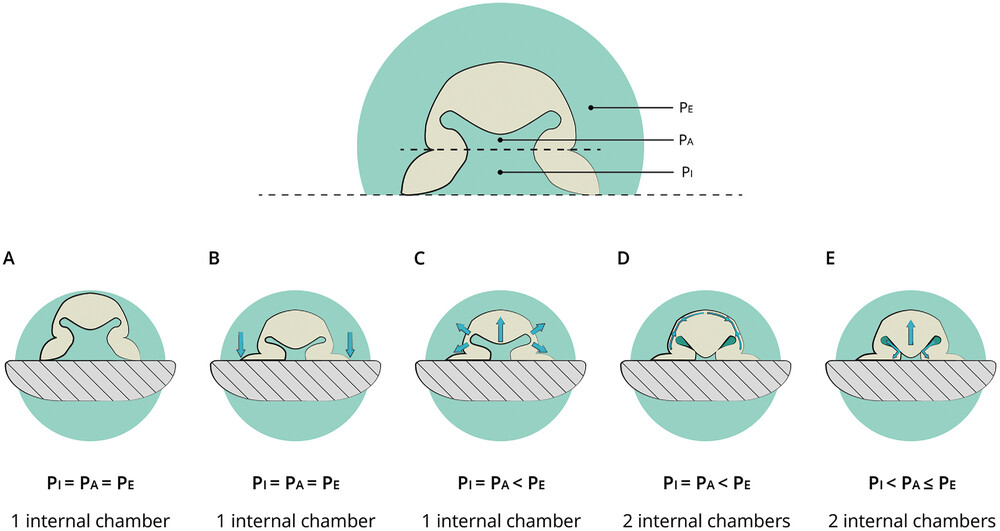
Classification and evaluation of octopus‐inspired suction cups for soft continuum robots
Author List: Stein van Veggel, Michaël Wiertlewski, Eugeni L Doubrovski, Adrie Kooijman, Ebrahim Shahabi, Barbara Mazzolai, Rob BN Scharff Published in: Advanced Science The emergence of the field of soft robotics has led to an interest in suction cups as auxiliary structures on soft continuum arms to support the execution…
-

Seahorse Tail-inspired Soft Pneumatic Actuator Utilizing Dual-mode Actuation
Author List: Dickson Chiu Yu Wong, Zijian Zhou, Garmisch Lai Yin Wong, Rob BN Scharff Published in: 2nd Workshop on Dexterous Manipulation: Design, Perception and Control (RSS) In this article, a 3D-printed soft pneumatic actuator inspired by the structure of a seahorse’s tail is proposed. Unlike previous pre-curved soft pneumatic…
-
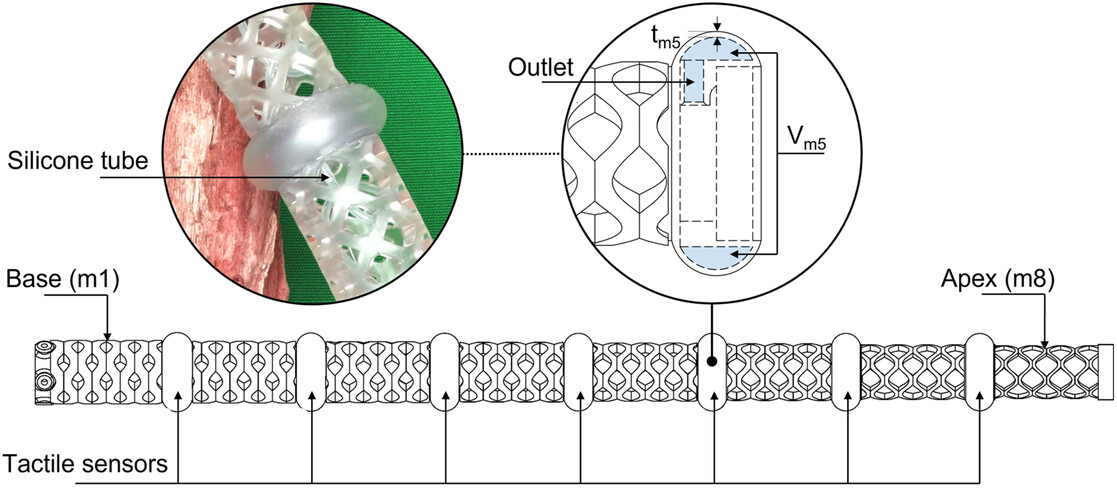
A Soft Continuum Robotic Arm with a Climbing Plant‐Inspired Adaptive Behavior for Minimal Sensing, Actuation, and Control Effort
Author List: Giovanna A Naselli, Rob BN Scharff, Marc Thielen, Francesco Visentin, Thomas Speck, Barbara Mazzolai Published in: Advanced Intelligent Systems A key challenge in designing soft continuum robotic arms is the realization of intelligent behavior while minimizing sensing, actuation, and control effort. This work investigates how soft continuum arms…
-
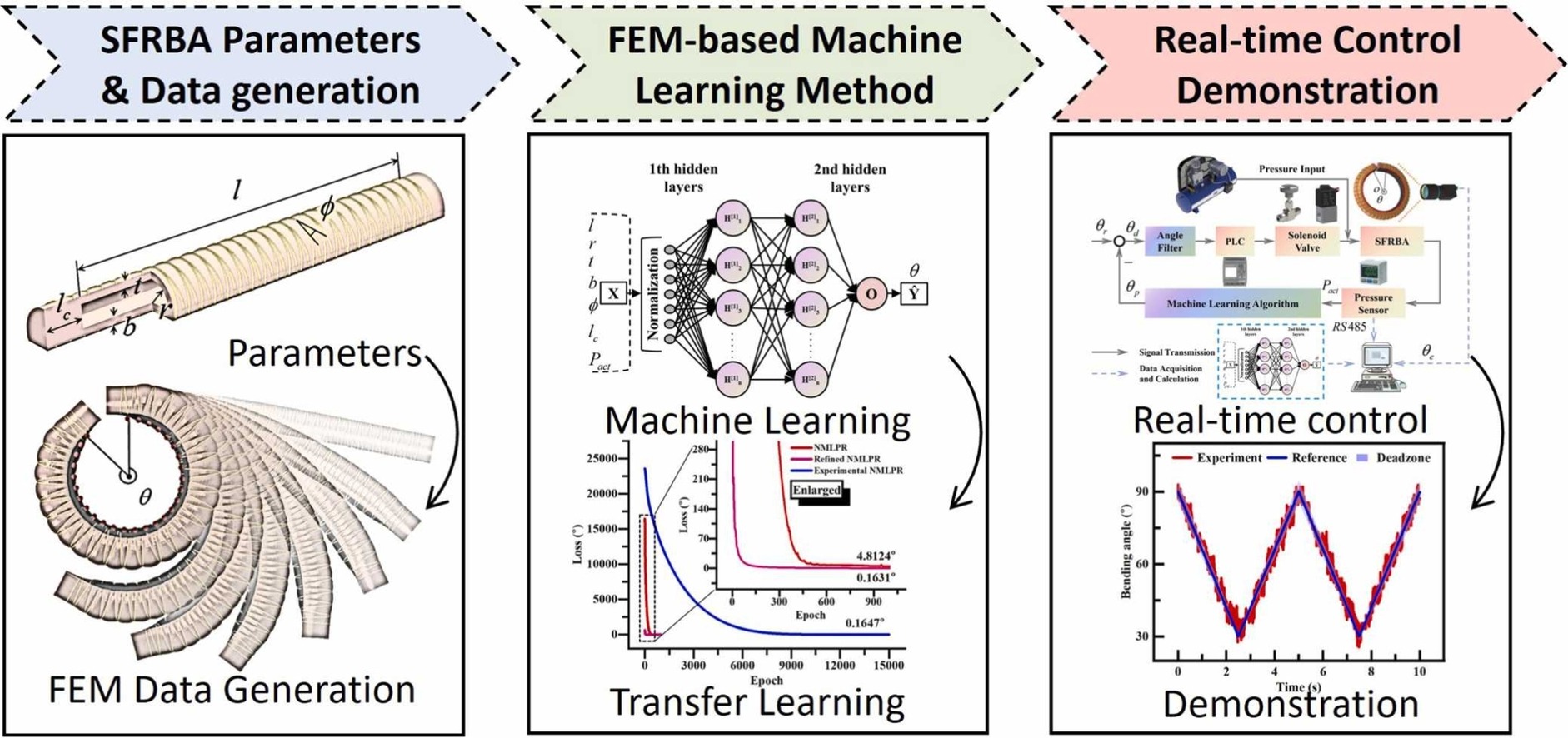
Modelling of soft fiber-reinforced bending actuators through transfer learning from a machine learning algorithm trained from FEM data
Author List: Yongkai Ye, Rob BN Scharff, Sifang Long, Chaoyue Han, Dongdong Du Published in: Sensors and Actuators A: Physical A soft fiber-reinforced bending actuator (SFRBA) is a multi-material system that plays a crucial role in robotics applications due to its high output force and robust bending motion. However, the multi-material composition of SFRBAs…