
Whole-arm manipulation
-
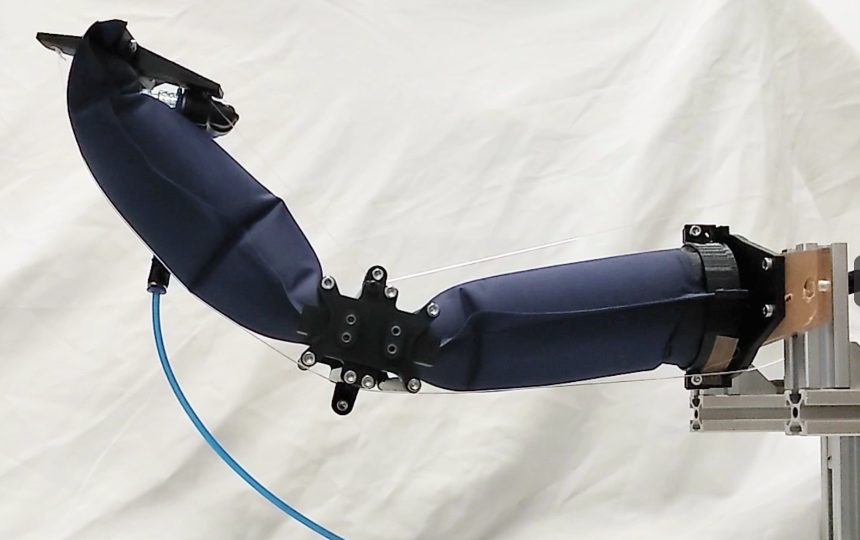
Toward Octopus-inspired Whole arm Manipulation: A Sliding Pseudo-joint for Soft Pneumatic Robot Arm
Author list: Yucheng Luo; Ming Chun Chan; Dickson Chiu Yu Wong; Yuchen Liang; Rob B.N. Scharff Published in: 2025 IEEE 8th International Conference on Soft Robotics (RoboSoft) Whole arm manipulation with soft robot arms is a challenging problem because, in contrast to traditional robot arms with grippers mounted at the…