I am thrilled to share that our paper, “Octopus-Inspired Embodied Tactile Intelligence: A Universally-Calibrated Miniature Vision-Based Suction Cup,” has been accepted by IEEE/ASME Transactions on Mechatronics (TMECH) and will be presented at AIM2026! 🐙🚀
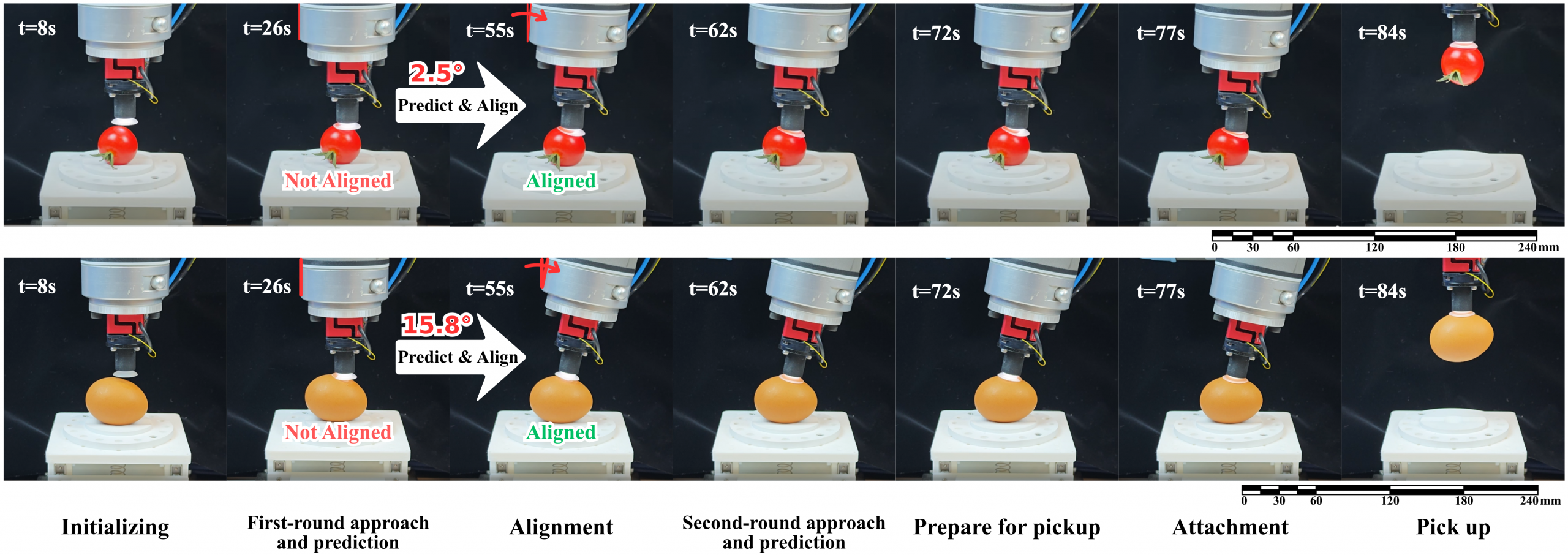
We have developed a miniaturized, vision-based suction cup that gives robotic manipulators a sense of touch—enabling autonomous alignment and the safe grasping of delicate, misaligned objects.
Here are our main contributions:
🔹Miniaturization: Shrank the system to a compact 22 x 40 mm footprint by integrating a micro-camera.
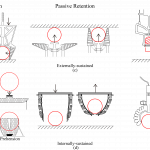
🔹 Simultaneous Multimodal Sensing: Real-time detection of 3-axis pressing forces and contact orientation for closed-loop surface alignment.
🔹 Universal Calibration: Our neural network applies universally to identically designed suction cups, eliminating the need for per-unit recalibration.
🔹 Enhanced Mechanical Performance: Achieved 36.3 kPa adhesion with just a 2.3 N preload to safely handle delicate, curved objects.
A massive thank you to corresponding authors: Prof. Rob Scharff and Prof. Wenqi Hu. Huge thanks also to my fantastic co-authors: Garmisch Wong, 魏泱, Ming Chun Chan!
Octopus-Inspired Embodied Tactile Intelligence: A Universally-Calibrated Miniature Vision-Based Suction Cup