
-

🌄 Tai Mo Shan Hiking Day! 🌄
-

Prof. Rob SCHARFF honored with the AIS Teaching Excellence Award 2024/25
-
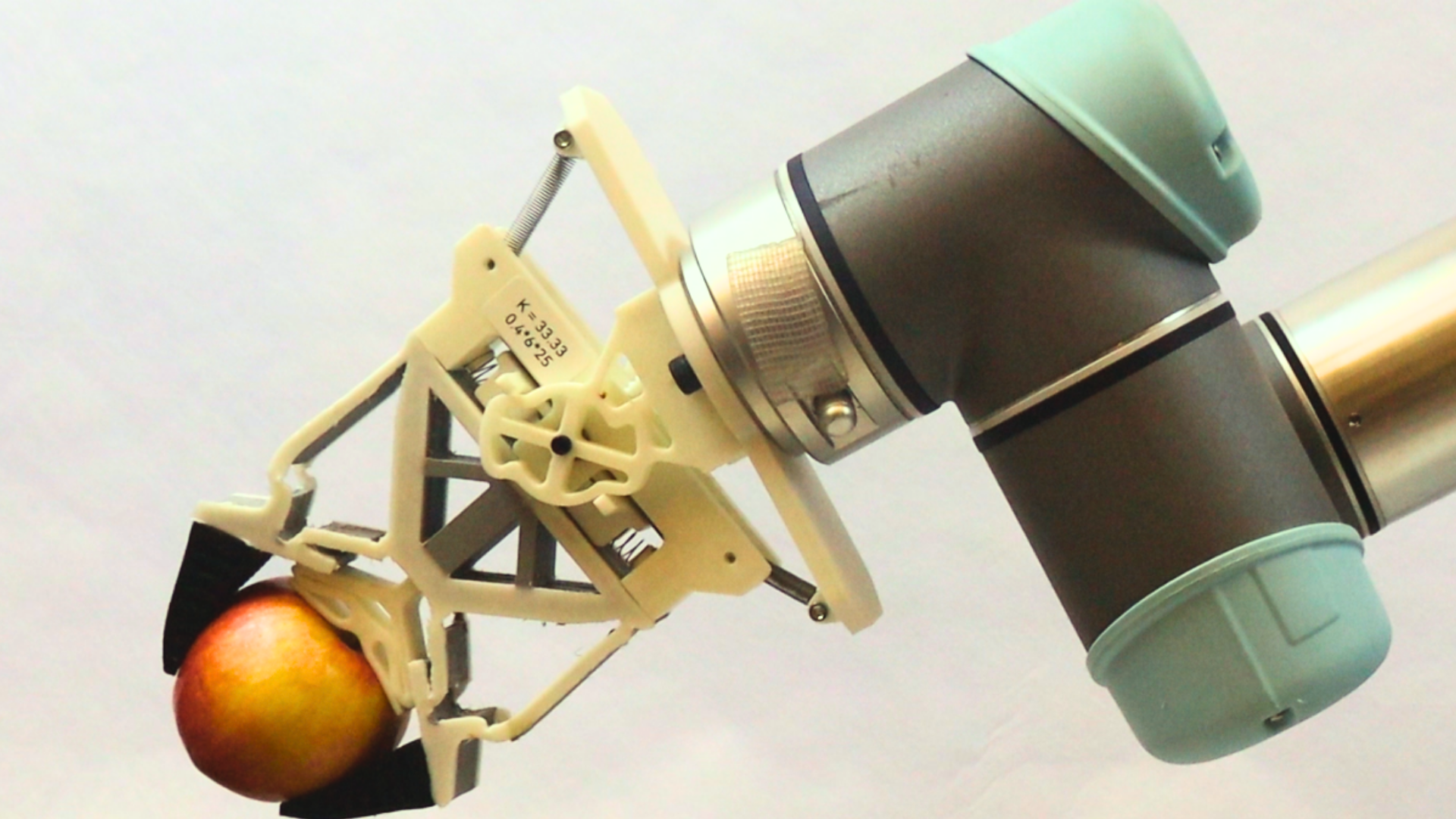
Passive Adaptive Object Prehension, Retention, and Release With a Mechanically Intelligent Gripper
-
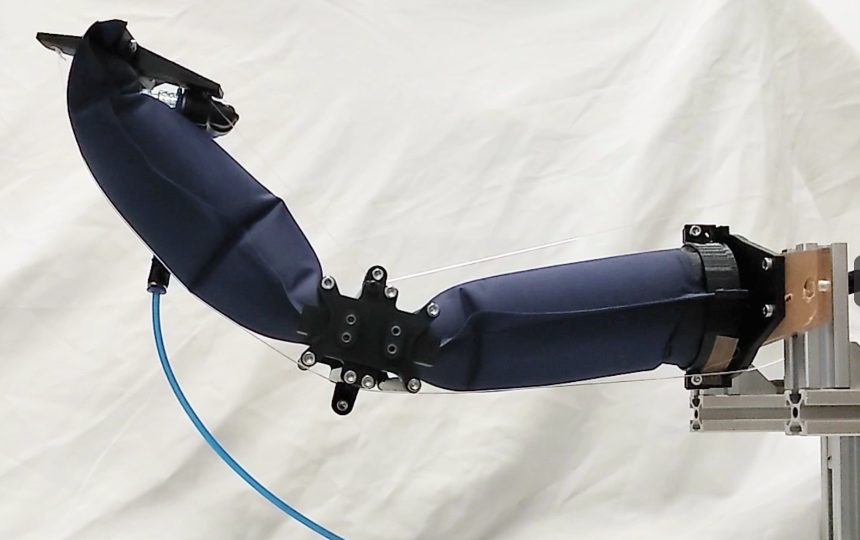
Toward Octopus-inspired Whole arm Manipulation: A Sliding Pseudo-joint for Soft Pneumatic Robot Arm
-
Outstanding Arts Exhibit 1st Place (RoboSoft 2025)
-

Attended IEEE RoboSoft 2025
-
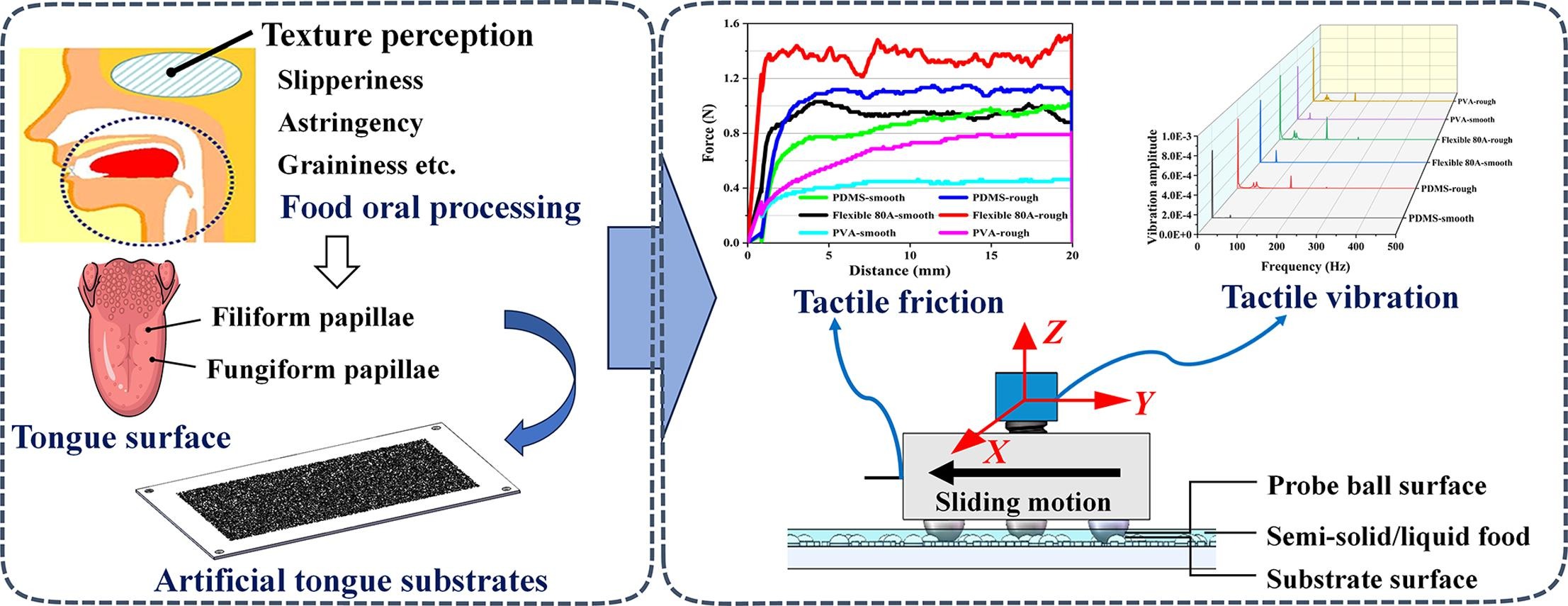
Application of biomimetic tongue substrate to investigate the role of friction and vibration in sensory texture perception
-
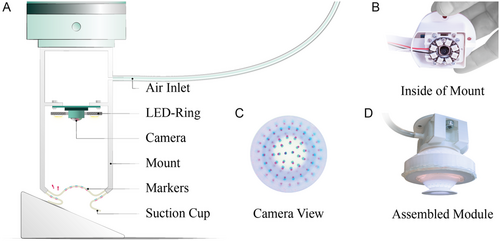
Optoelectronically Innervated Suction Cup Inspired by the Octopus
-
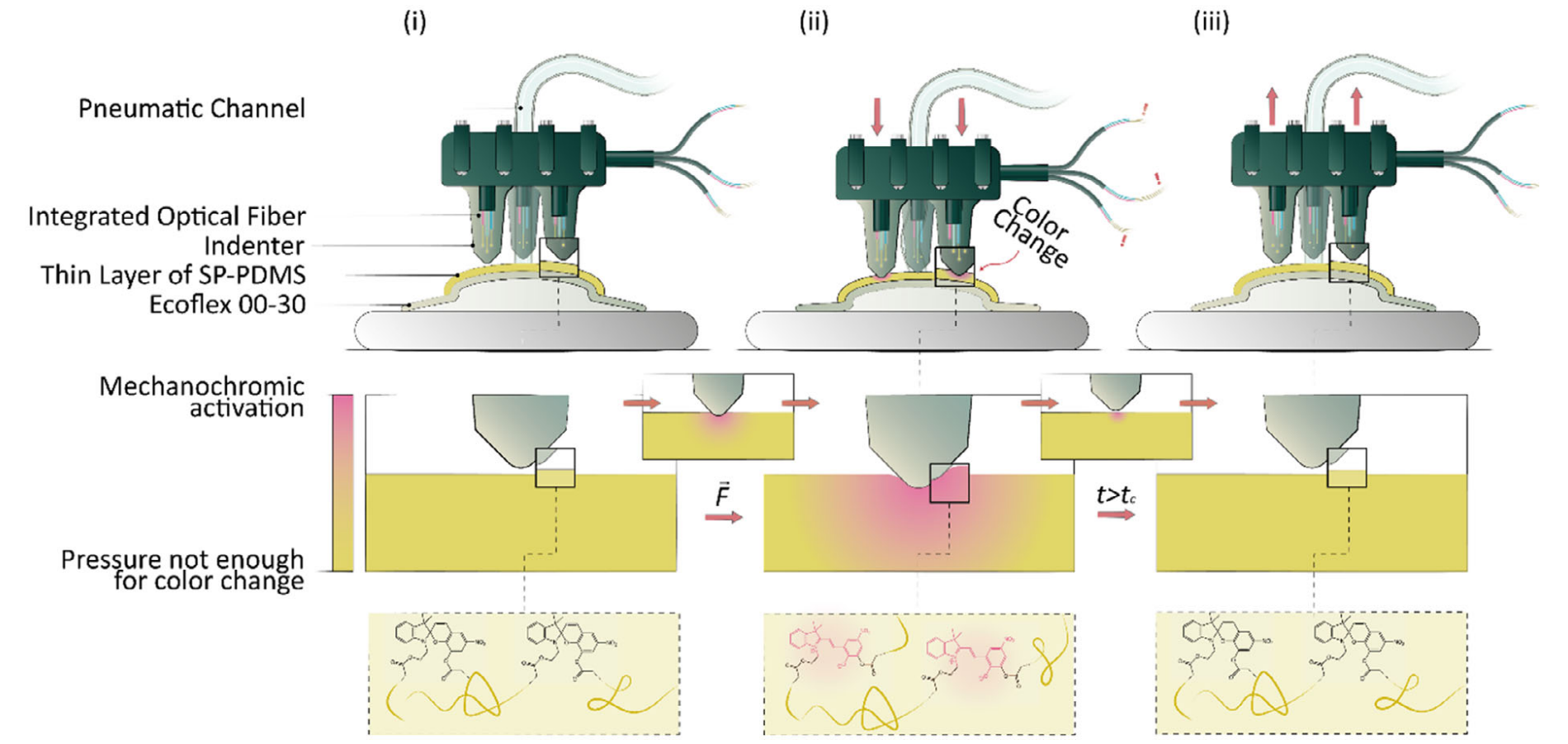
Mechanochromic suction cups for local stress detection in soft robotics
-
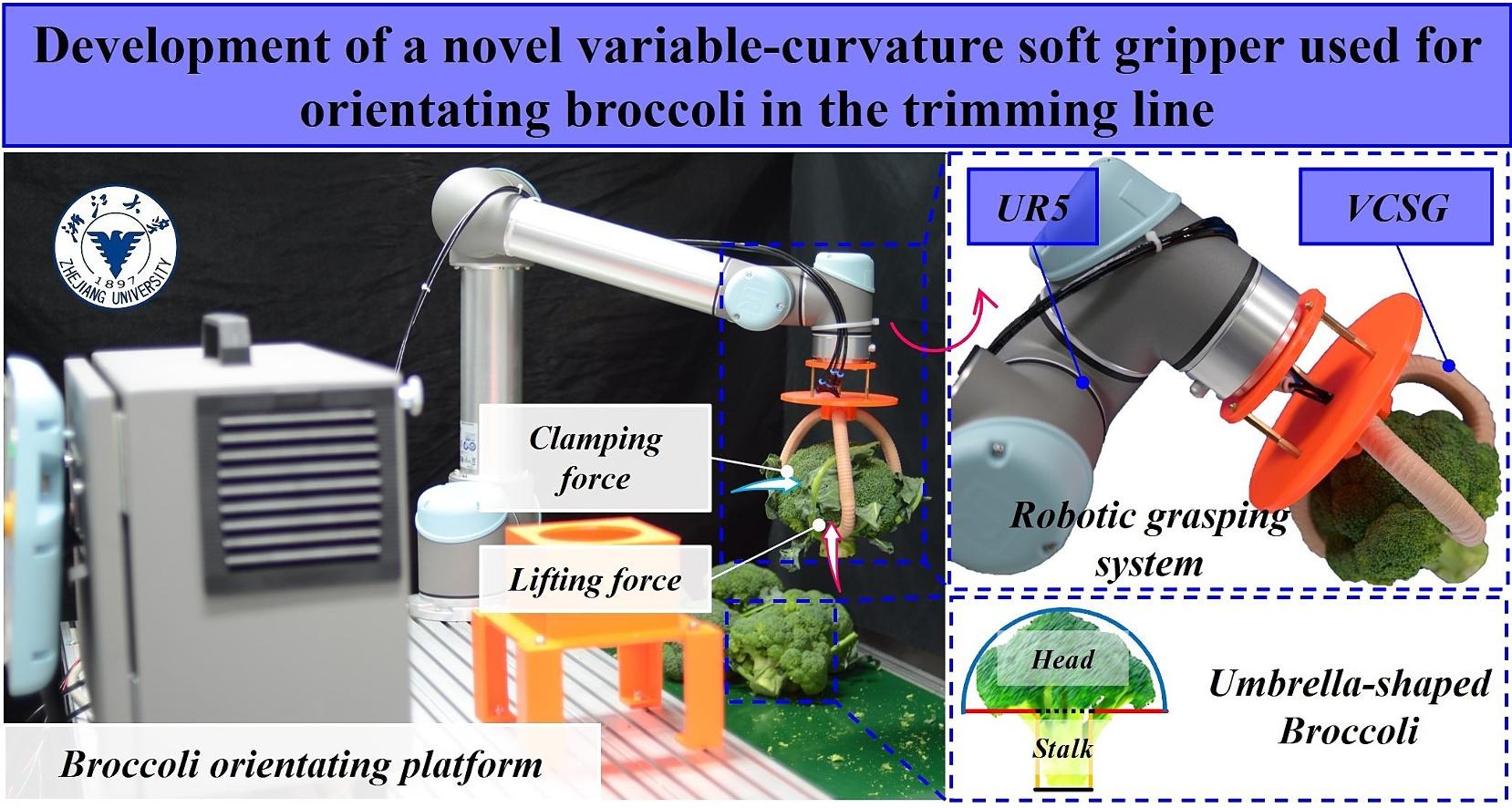
Development of a novel variable-curvature soft gripper used for orientating broccoli in the trimming line