
-

Prof. Rob SCHARFF honored with the AIS Teaching Excellence Award 2024/25
-
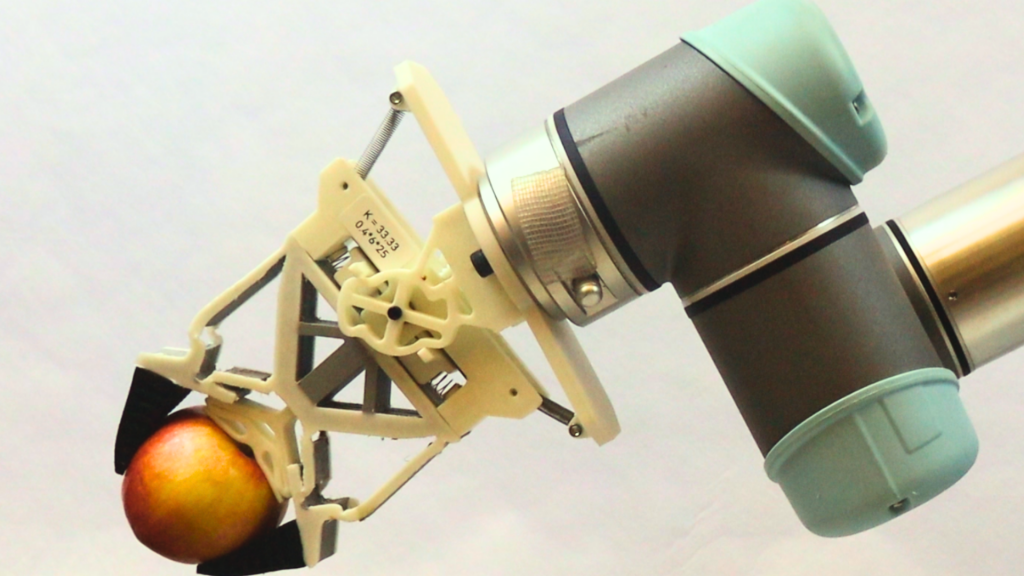
Passive Adaptive Object Prehension, Retention, and Release With a Mechanically Intelligent Gripper
-
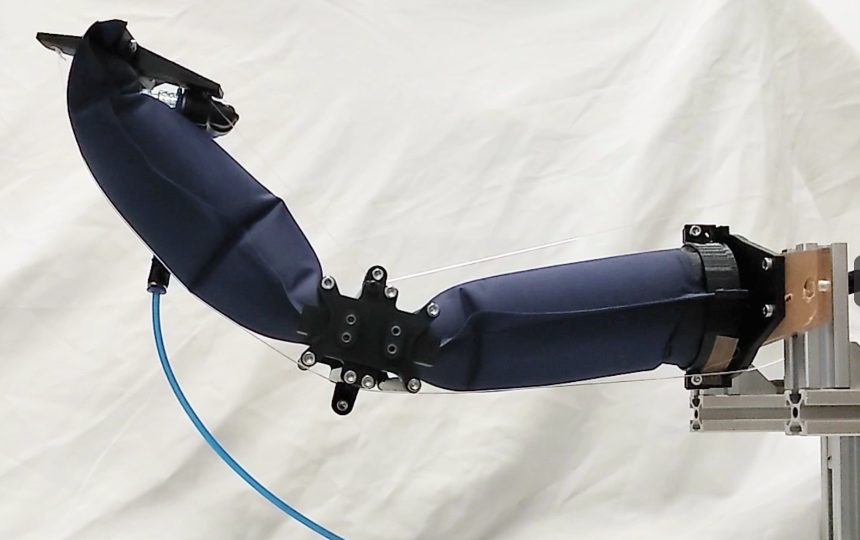
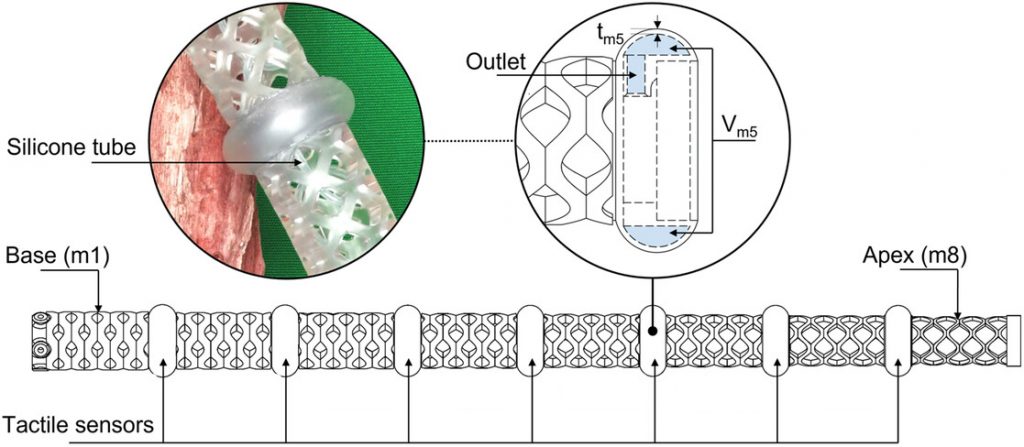
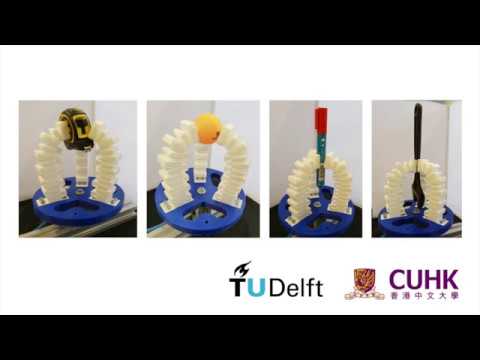
Toward Octopus-inspired Whole arm Manipulation: A Sliding Pseudo-joint for Soft Pneumatic Robot Arm
-
Outstanding Arts Exhibit 1st Place (RoboSoft 2025)
-
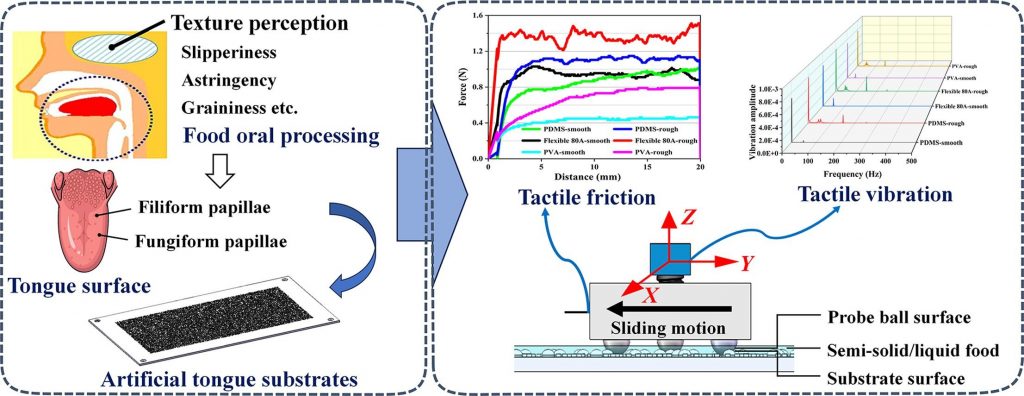
Application of biomimetic tongue substrate to investigate the role of friction and vibration in sensory texture perception
-
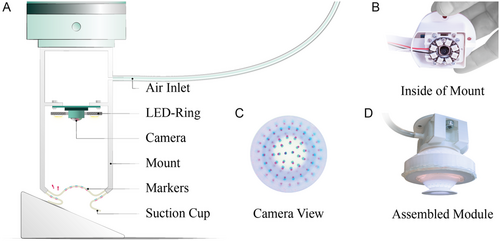
Optoelectronically Innervated Suction Cup Inspired by the Octopus
-
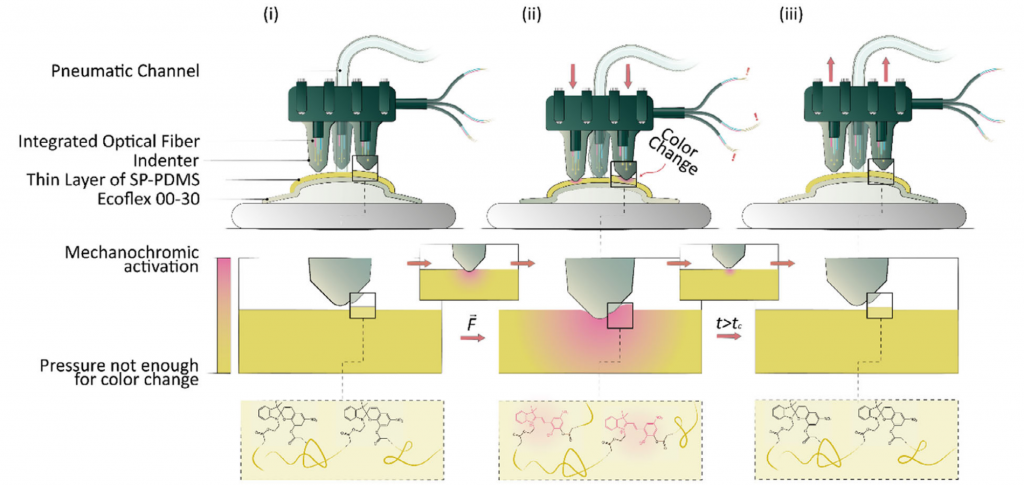
Mechanochromic suction cups for local stress detection in soft robotics
-
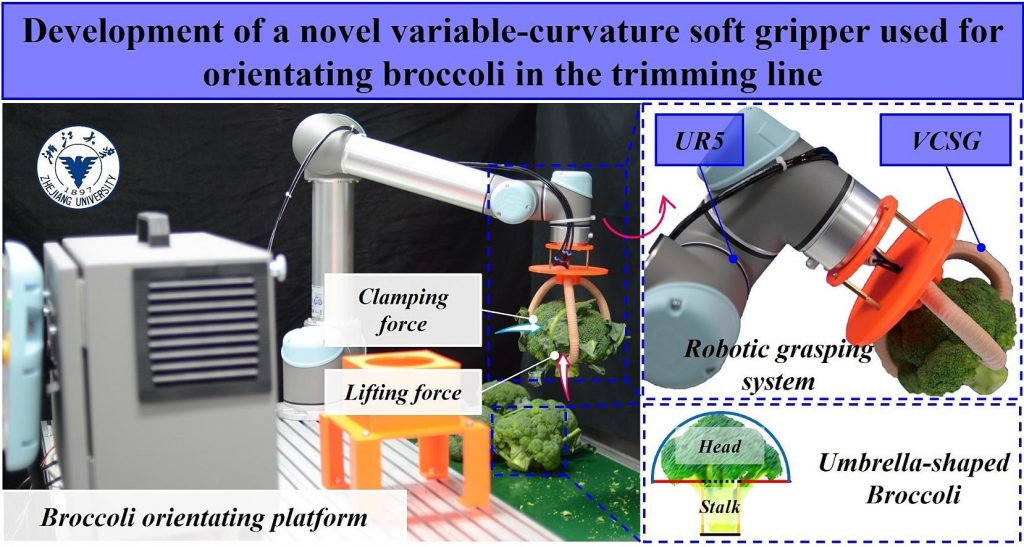
Development of a novel variable-curvature soft gripper used for orientating broccoli in the trimming line
-
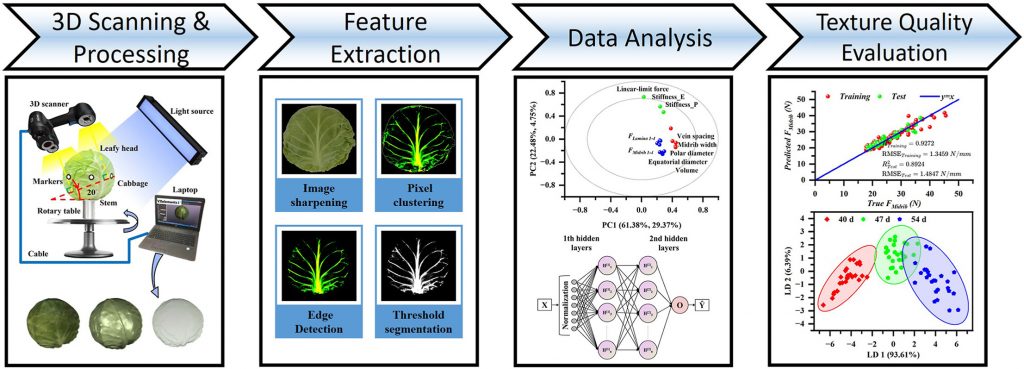
Nondestructive evaluation of harvested cabbage texture quality using 3D scanning technology
-
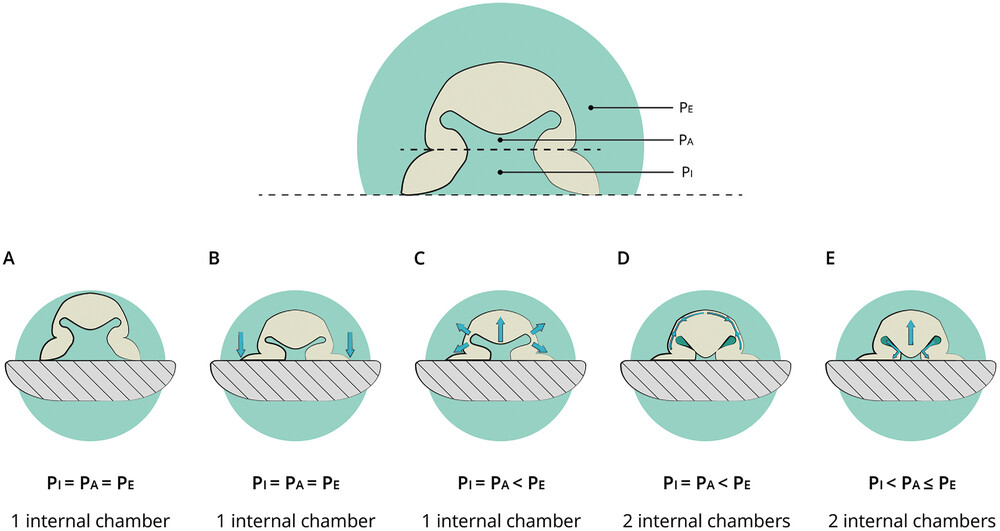
Classification and evaluation of octopus‐inspired suction cups for soft continuum robots
-
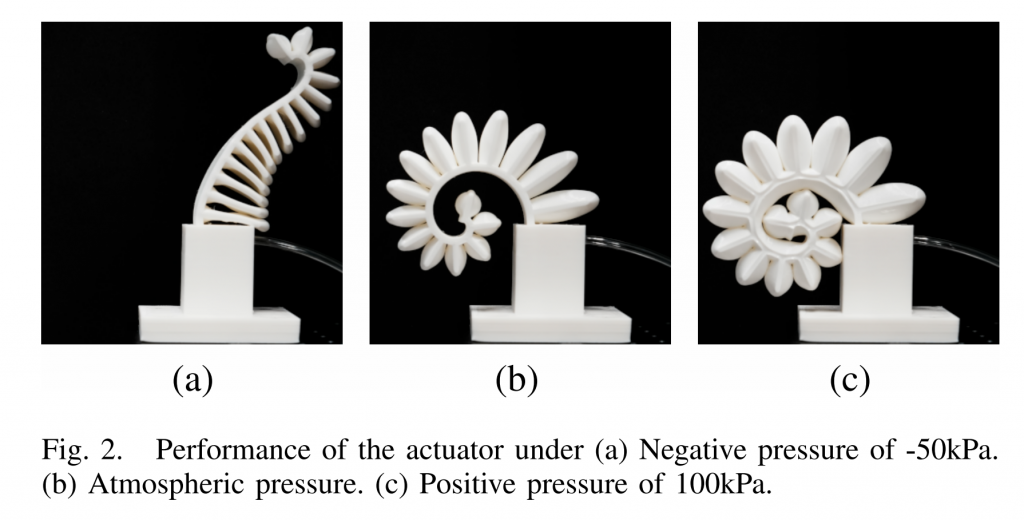
Seahorse Tail-inspired Soft Pneumatic Actuator Utilizing Dual-mode Actuation
-

Autonomy Award RoboSoft 2024
-
A Soft Continuum Robotic Arm with a Climbing Plant‐Inspired Adaptive Behavior for Minimal Sensing, Actuation, and Control Effort
-
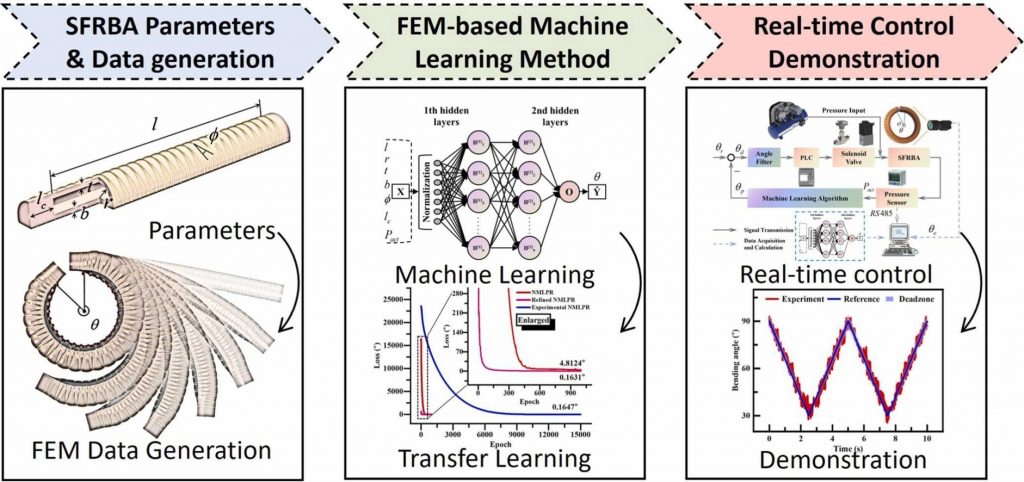
Modelling of soft fiber-reinforced bending actuators through transfer learning from a machine learning algorithm trained from FEM data
-
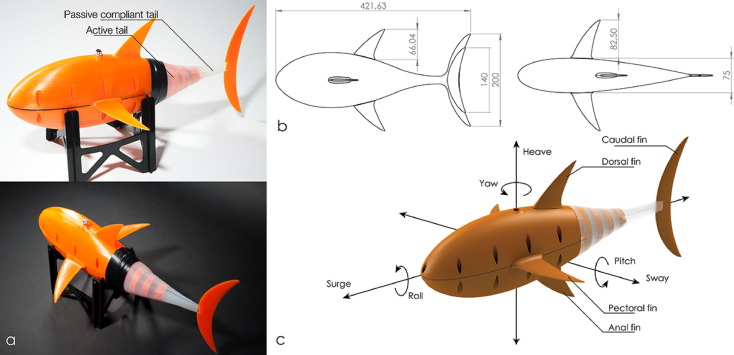
OpenFish: Biomimetic design of a soft robotic fish for high speed locomotion
-
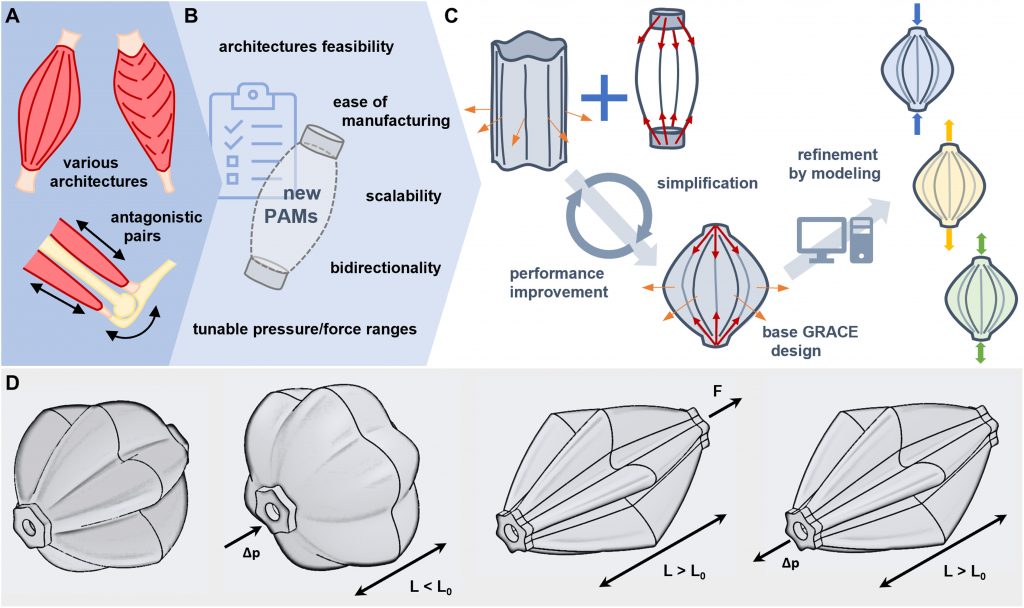
3D-printed biomimetic artificial muscles using soft actuators that contract and elongate
-
Rapid manufacturing of color-based emispherical soft tactile fingertips
-
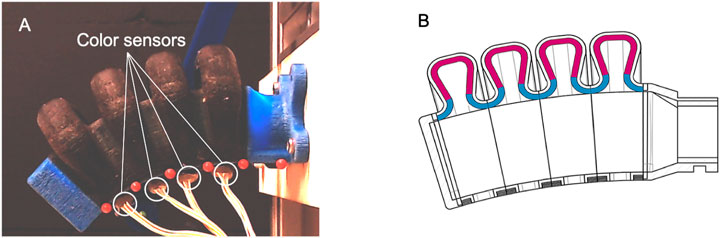
Color-based proprioception of soft actuators interacting with objects
-
Reducing out-of-plane deformation of soft robotic actuators for stable grasping